- 2024-2-8
- 技術ニュース, 機械系, 海外ニュース
- YouTube, ねじれリングボット(twisted ringbot), ソフトロボット, ノースカロライナ州立大学ノースカロライナ州立大学, ヘルスモニタリング, 学術, 液晶エラストマー, 米国科学アカデミー紀要(PNAS)
前進、回転、周回という3つの動作を同時に行う新しい設計のソフトロボットが開発された。「ねじれリングボット(twisted ringbot)」と呼ばれるこのソフトロボットは、人間やコンピューターが制御しなくても動作するため、未知の環境を探索してマッピングするソフトロボット技術として有望なものだという。この研究は米ノースカロライナ州立大学によるもので、2024年1月9日付で『米国科学アカデミー紀要(PNAS)』に掲載された。
ねじれリングボットは、らせん状のショートパスタのようにねじれたリボン状の液晶エラストマーの端同士をつなぎ合わせ、ブレスレットのような輪にしたものだ。このロボットを大気より高温な55℃以上の面に置くと、その面に接触している部分は収縮し、空気に触れている部分は収縮しない。これが転がる動きを誘発し、その面の温度が高ければ高いほどロボットは速く転がる。
さらに、ねじれリングボットは、ターンテーブル上のアナログレコードのように中心軸に沿って水平回転する。そして、このリングボットは前進すると中心点を回る軌道経路を進み、基本的に大きな円を描くように移動する。これは自転しながら地球の周りを公転する月の動きに似ており、ねじれリングボットは軸を中心に回転し、同じ回転周期で円軌道を周回できる。
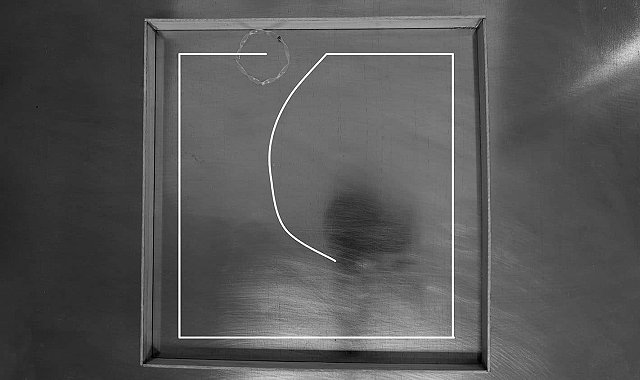
しかし、このソフトロボットは箱の壁のような境界にぶつかると、その境界線に沿って移動する。この挙動は、狭い閉鎖空間や閉鎖環境の境界形状をマッピングしたり、構造物のヘルスモニタリングのために構造上の損傷を発見したりするのに役立つ可能性があるという。
ねじれリングボットの動きは、コンピューターや人間が介入して指示するものではなく、デバイスの構造設計やその素材によって決定されるため、ねじれリングボットの形状を変えることでその挙動を微調整できる。例えば、リボンをねじる向きによってリングボットが回転する方向を制御でき、リボンの幅やねじりの数などを変えることで速度を調整できる。
概念実証テストでは、ねじれリングボットがさまざまな閉鎖空間の輪郭に沿って進めることを示した。YouTubeで公開されている動画では、ねじれリングボットは空間のどこに置かれても、まず境界にぶつかるまで移動し、その後は境界に沿って動き、空間の輪郭をマッピングする様子を確認できる。
さらに、それぞれ異なる方向に回転する2つのねじれリングボットを空間内に置いて、より複雑な空間の境界をマッピングすることもできたという。ねじれリングボットは比較的安価に製造できるため、十分な数のねじれリングボットを投入し、それぞれに空間の一部をマッピングさせることで、複雑な空間でも全体像をマッピングすることが原理的に可能だという。