- 2024-7-23
- ニュース, 制御・IT系, 技術ニュース
- サイバー空間, スマートモビリティ, デジタルツイン, ハイブリッド自動運転システム, バージニア工科大学, フィジカル空間, 東京工業大学, 研究, 自動運転

東京工業大学は2024年7月19日、米バージニア工科大学と共同で、実世界の交通状況をサイバー空間上にリアルタイムで再現する「スマートモビリティデジタルツイン」による自動運転に成功したと発表した。
デジタルツインはこれまで製造や建設分野などでの応用が広がっていたが、ダイナミックスが高いモビリティ分野では実現できていなかった。
今回は東京工業大学大岡山キャンパスのスマートモビリティ教育研究フィールドをフィジカル空間としてサイバー空間上に再現した。フィールド上の自動運転車や路側機などのエッジサーバーでは、LiDARやカメラなどで周辺の自動車や自転車、歩行者などの情報を検知。車両周辺や交差点などの特定の狭域デジタルツインを構築する。加えて、複数の自動運転車などから検出された情報をクラウドに集約してポイントクラウド/3Dマップに重畳することで、フィールド全体の広域デジタルツインを構築する。これらの狭域デジタルツインと広域デジタルツインを階層化することで、衝突回避や配送最適化などの異なる要求条件を持つユースケースを両立させることができるという。
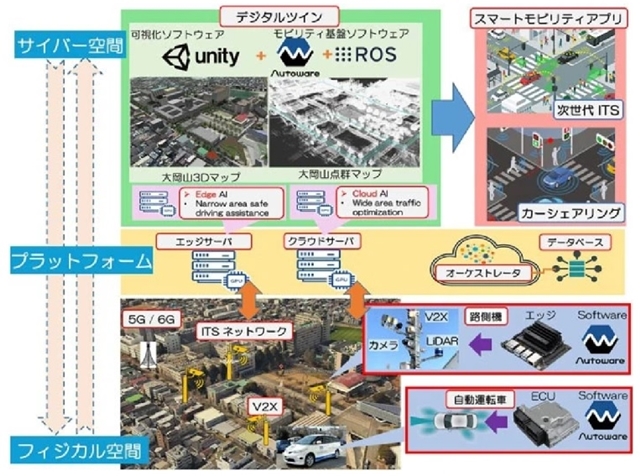
スマートモビリティデジタルツインのシステム構成
また、自動運転車の周辺環境観測に基づく経路計画と、デジタルツインによる広域の環境観測に基づく経路計画を、V2X通信を介して統合することで、安全性と効率性を両立させることができるようになる。具体的には、自動運転車のデジタルツインをサイバー空間に構築。サイバー空間の広域デジタルツイン上で経路計画を実施し、採択された経路をフィジカル空間の自動運転車にフィードバックする。これによって、フィジカル空間の自動運転車が、デジタルツイン上で採択された経路と自車のセンサーを使って自律的な制御を行える、ハイブリッド自動運転システムを実現した。同大学によると世界初となる。

ハイブリッド自動運転
同システムによる実証実験では、フィジカル空間で自動運転車が自律走行する際に、デジタルツイン上でさらに安全かつ効率的な経路を探索して、それを自動運転車へフィードバックすることで、自律と遠隔のハイブリッドな自動運転ができることを確認した。
今回開発したハイブリッド自動運転技術は、交通の安全性と効率性の双方を同時に改善し、交通システムの最適化に貢献することが期待できるという。
関連情報
スマートモビリティデジタルツインを用いた自律と遠隔のハイブリッドな自動運転を実現 安心安全なまちづくりと交通システム全体の最適化に貢献 | 東工大ニュース | 東京工業大学