- 2023-9-7
- 技術ニュース, 機械系, 海外ニュース
- 3Dプリント, BASF, Michael T. Tolley, オイラー路, カリフォルニア大学サンディエゴ校, グラフ理論, ソフトグリッパー, ソフトロボット工学, タッチセンサー, ロボットグリッパー, 学術, 重力センサー, 電子回路
JacobsSchoolNews/YouTube
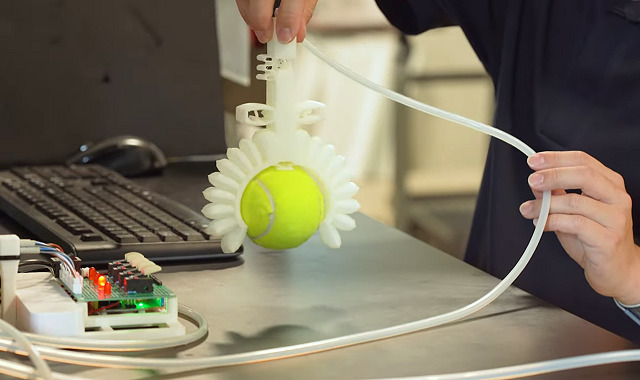
カリフォルニア大学サンディエゴ校とBASFの研究チームは、1回の3Dプリントで作成でき、電子回路を必要としない柔軟なロボットグリッパーを開発した。このソフトグリッパーは3Dプリンターから取り出してすぐに使用可能で、まるで重力センサーやタッチセンサーを内蔵しているかのように、物体を持ち上げたり、保持したり、離したりできる。
一般的な3Dプリント手法で造形されたソフトグリッパーは、造形直後は硬くて隙間が多く、実際に使えるようにするには造形後の後処理として多くの加工と組み立てが必要だ。研究者らは、プリンターのノズルが各層のパターン全体を連続的になぞるという新しい3Dプリント方法を考案することで、これらの問題を回避した。この方法はグラフ理論に登場する、グラフの全ての辺を通る「オイラー路」に基づいているという。この論文の上席著者であり、カリフォルニア大学サンディエゴ校ジェイコブス工学部のMichael T. Tolley准教授は、「造形プロセスを鉛筆で一筆書きをするようなもの」と説明する。
この方法によって、柔らかい材料で印刷する場合にありがちな、隙間からの漏れや欠陥の可能性が低くなる。この新しいアプローチでは、0.5mmという薄い壁の造形も可能だ。より薄い壁や複雑な曲線の形状は、より多くの変形を可能にし、結果として全体的な構造をより柔らかくする。
一定の空気圧を加えると、グリッパーは自律的に物体を検知して把持する。グリッパーを水平方向に回転させることで、バルブ内のエアフローが変化し、2本の指が開いて物体を放す。グリッパーの全製造工程は、後処理、後組み立て、製造上の欠陥の修復を必要としないため、このアプローチは非常に再現性が高く、利用しやすいものとなっている。
ソフトロボット工学は、ロボットが安全な方法で人間や壊れやすいものと相互作用できるようにする可能性を秘めている。研究チームによると、このグリッパーは、工業生産、食品加工、果物や野菜のハンドリング用のロボットアームに取り付けられる可能性がある。また、ロボットに取り付けて研究や探査に使うこともできる。また、動力源として高圧ガスのボトルを使うだけで、無拘束で動作させることもできる。
「私たちが提案するアプローチは、複雑でカスタマイズされたロボットシステムや、分散型製造施設で製造されるコンポーネントへの一歩を示すものです」と、研究チームは語っている。
関連情報
This 3D Printed Gripper Doesn’t Need Electronics To Function