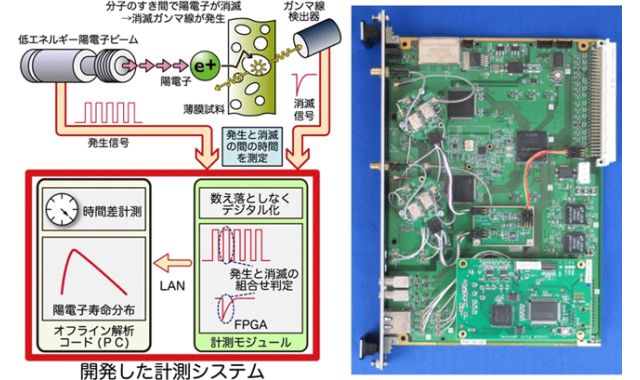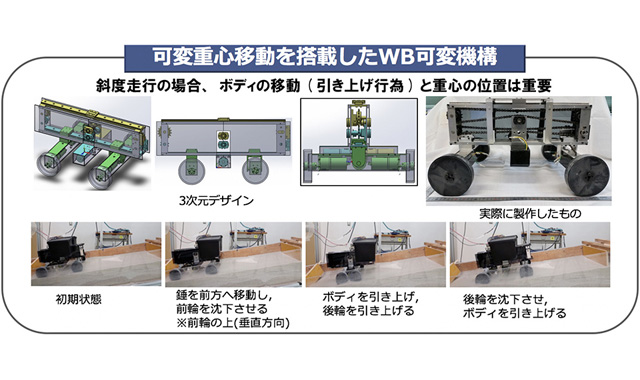
芝浦工業大学は2017年11月28日、同大の飯塚浩二郎准教授が、前後のタイヤ間隔を伸縮することで軟弱地盤でも前進できる車輪走行システムを開発したと発表した。
砂上や田んぼなどのぬかるみ、月面などのレゴリス(細粒物の軟弱地盤)では、タイヤが回転するとどんどん埋まってしまい、その場から動けなくなるという問題がある。飯塚准教授は、月・惑星探査ロボットの研究でタイヤがどのように沈下していくのか実験を重ね、タイヤにかかる力の変化を解析した。その結果、沈下現象を起こしているタイヤが前後から受ける力は非常に強く、逆にその力を利用して前進し続ける走行方法を発見した。
このシステムは、タイヤ沈下時に得られる支持力(前後にタイヤを動けなくする力)と、車輪軸間距離(ホイールベース)の伸縮を融合させ、尺取虫のような動き方で前進し続けることできる。前輪が砂に埋まった際、ホイールベースを縮めて後輪を前に動かすと、後輪を引っ張る力より前輪が固定される力の方が強く、前後輪を密着させることができる。その後、前輪を後輪から離すように動かすと、それまで動かなかった前輪がスムーズに前へ進み、前進できる。加えて、沈下させたいタイヤの方へおもりを動かす機構を追加することで、動作をさらにスムーズにした。
今回開発されたこの方法は、モーター(アクチュエーター)を1つ増やすだけでコストを低減できる。惑星探査機だけでなくレスキュー活動や雪上移動、農業にも応用でき、今後企業などとの共同研究により実用化を目指す。