- 2019-12-4
- ニュース, 制御・IT系, 技術ニュース
- オタワ大学, スイス連邦工科大学ローザンヌ校, ムカデ, ロボット工学, 北海道大学, 東北大学電気通信研究所, 水陸両用ロコモーション, 研究
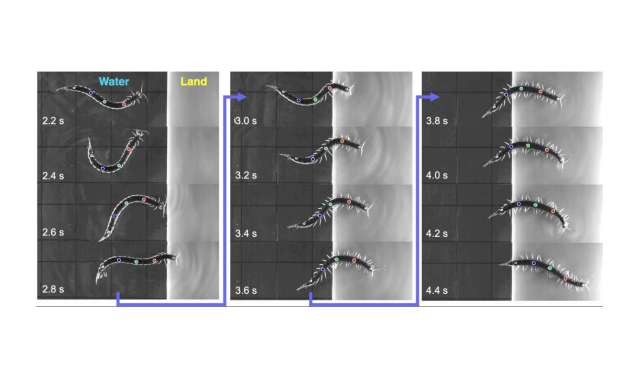
歩行と遊泳の切り替わりの様子。水中(各写真左側)では脚を折りたたみ、胴体 をくねらせながら進むが、陸地(各写真右側)に進むにつれ、複数の脚を協調させて動くようになる
東北大学電気通信研究所は2019年12月3日、オタワ大学、北海道大学、スイス連邦工科大学ローザンヌ校と共同で、ムカデが陸上と水中を行き来する際の身のこなし方を研究することで、「陸上では複数の脚を協調させて歩き、水中では胴体をくねらせて泳ぐ」という振る舞い(以下、水陸両用ロコモーション)の制御メカニズムを解明したと発表した。
身体をうまく活用し、質的に異なる環境に適応する水陸両用ロコモーションは、ある種のトカゲや魚など、多くの動物種に見られる動作だ。その背後にある運動制御メカニズムを解明すれば、自然環境を自在に移動できるロボットの制御方法としての応用が期待できる。しかし、水陸両用ロコモーションの制御のからくりについては、これまで分かっていなかった。
そこで東北大学電気通信研究所らの共同研究グループは、トビズムカデの水陸両用ロコモーションに着目した。トビズムカデは、同じ構造を持つ体節が一次元状に長く連なった身体構造をしており、歩行・遊泳間の遷移の様子を観察しやすい。また、神経を部分的に切断するなどの侵襲を伴う実験も比較的容易だ。
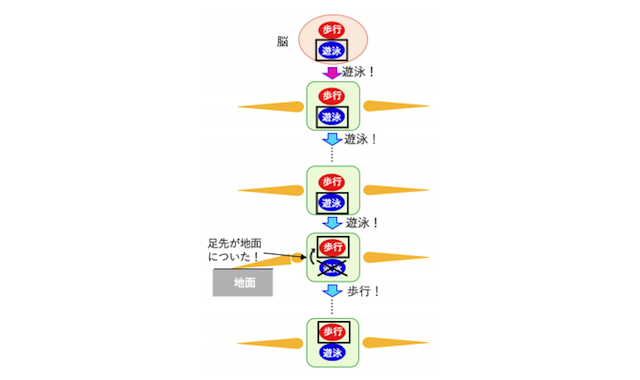
行動観察の結果、(1)歩行運動は脳からの指令がなくても発現し得る(2)遊泳運動は脳からの指令なしには発現し得ない(3)運動パターンは頭側から尾側に順に伝搬する(4)遊泳中であっても、足先が地面につくと、その部位の運動が歩行運動に変わる――ということが明らかになった。
上記(1)〜(4)の知見は、伝言ゲームのようなメカニズムを考えれば説明がつく。身体の各部位ごとに、「歩行」か「遊泳」のどちらかを選択できるとする。脳から「歩行」か「遊泳」のどちらかの指令が下されると、その指令は頭側から尾側に順に伝わる。ところが、同じ指令が最後まで伝わるかというと、そうとは限らない。「遊泳」の指令が伝わっているときに、ある脚の足先が地面につくと、その部位の指令が「歩行」に上書きされ、それ以降は「歩行」の指令が伝わっていく。
共同研究チームによると、このメカニズムを数式で表し、シミュレーションを行った結果、行動観察結果を見事に再現できたという。
今回の成果は、ムカデだけでなく多くの動物に共通する環境に応じた運動パターンの遷移のからくりの解明につながるだけでなく、従来よりも高い環境踏破能力を持つ水陸両用ロボットの開発にもつながるという。