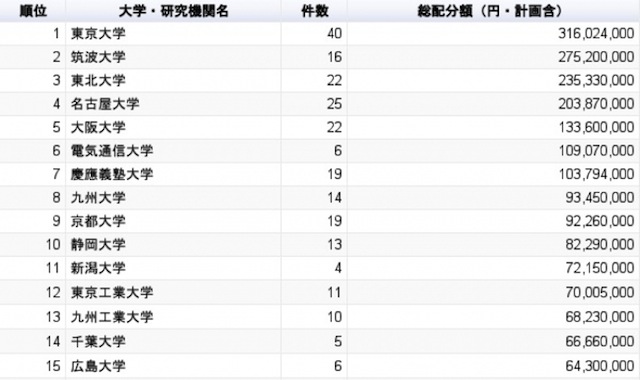
アスタミューゼは2016年3月31日、運転支援・自動運転市場における注目に値する研究テーマと共に、同市場における大学・研究機関別の科研費獲得金額ランキングを発表した。運転支援・自動運転市場は、総額約36億円を科研費として獲得している。
同社が注目した研究テーマは、名古屋大学の高田広章教授らによる「組込みシステム向けデータ集約型パラダイムの実現と車両走行制御への適用」(獲得金4524万円)、慶應義塾大学の大前学教授らによる「運動制御レベルでの車両-インフラ協調による自動車の自動運転制御に関する研究」(獲得金2210万円)、筑波大学の伊藤誠准教授らによる「自然な運転状況の中での人間-機械双中心型多層的追突回避マネジメント」(獲得金4628万円)の3つだ。
「組込みシステム向けデータ集約型パラダイムの実現と車両走行制御への適用」では、組込みシステムにデータ集約型パラダイムを適用するための新たなソフトウェア構築フレームワークに関して、組込みシステムに適用する際に重要となるデータの信頼性やリアルタイム性への対応について研究開発している。さらに、開発したフレームワークをカメラやレーダーなどのセンサーデータを動的に集約する自動車の走行制御に関するアプリケーションに適用することにより、データ集約型パラダイムとフレームワークの有効性も検証している。
「運動制御レベルでの車両-インフラ協調による自動車の自動運転制御に関する研究」は、路側の構造物に設置されたセンサや制御装置といったインフラから自動車を運動制御レベルで協調制御できることを実証し、その有用性と技術的妥当性を明らかにすることを目的としている。研究の結果、カメラなどを用いたインフラからの車両認識により車両運動制御を行うために十分な精度で情報を獲得できると明らかになった。認識手法・通信手法の複合化による信頼性の向上にも取り組み、実際の技術運用に向けての研究も実施している。
「自然な運転状況の中での人間-機械双中心型多層的追突回避マネジメント」では、特別な能力や運動特性を持つ対象物(機械、他の人間など)と人間をネットワーク接続することで遠隔地の作業を支援するなど、人間の能力を向上させることを目的とした人間拡張型テレプレゼンス技術を研究している。具体的には、ドローンによる飛翔型テレプレゼンスシステムの研究開発を実施。操作者は同システムを利用することで、ドローンから送られてくる映像を見ながら自分自身の身体動作をドローンの動きに反映させることにより、飛翔能力を持ったような感覚を覚えられる。
科研費獲得金額ランキング1位は、約3億1600万円を獲得した東京大学。2位には、約2億7500万円で筑波大学が続いた。名古屋大学は約2億400万円で4位、慶應義塾大学は約1億400万円で7位だった。