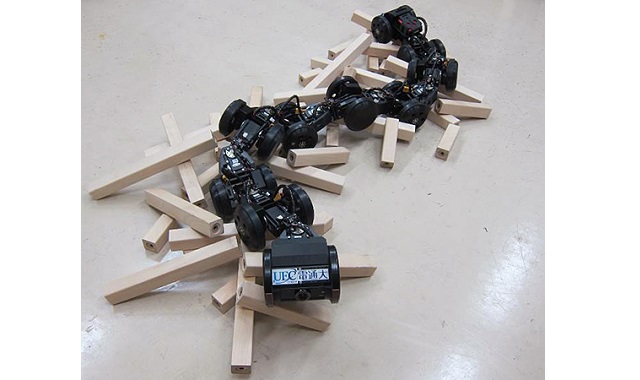
電気通信大学、金沢大学らは2017年4月4日、狭路移動や障害物乗り越え性能に優れたヘビ型ロボット「T2 Snake-3」を開発したと発表した。
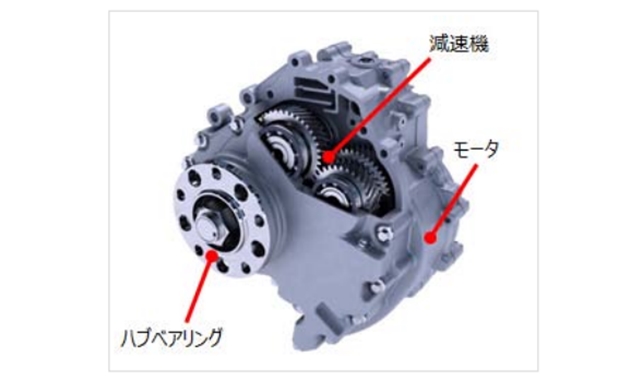
同ロボットは、内閣府総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジの一環として開発された。車輪部を関節で直列に連結した構造で、17個の関節用モータと10個の車輪用モータを搭載。全長1730mmで重さは約9kgとなっている。
先頭と最後尾にカメラが搭載されており、その映像を見ながら無線遠隔で操作用コントローラを使って操作する。操作は原則先頭ロボットの動きだけを指示し、指示された先頭の動きに追随してロボット自らがそれ以降の最後尾までの胴体の動きを生成して実行する仕組みだ。周囲環境までの距離や傾きを非接触で計測できる近接覚センサを先頭から最後尾までの胴体底部に搭載しており、全車輪の接地状態や地面との傾きを検出して動作制御に用いる。
胴体の細さを生かして、高さ120mm×幅250mmの狭路を移動することができ、高さが120mmと低いためにプラント内にあるせり出した配管などの障害物も容易にくぐることができる。さらに、その長さを生かして、最大で高さ1mの障害物を乗り越えることも可能だ。これにより地面近くに設置されている配管をまたいで進むことができる。
また、先頭部にロボットハンドを搭載しており、ロボットの先頭を持ち上げてロボットアームのように動作させることによって、操作盤の操作や小物体を拾うことなどもできる。さらに、先頭部を大きく持ち上げることで、地面から高い位置の計器を確認したり障害物の向こう側を覗き込んだりすることも可能だ。
今後は、らせん階段の昇降の実現や故障時の制御方法の検討を行うと共に、ロボットハンドとの統合による作業能力の拡充や、さらなる操作性の向上などを目指す。