- 2017-11-2
- ニュース, 制御・IT系, 技術ニュース
- ImPACT, 内閣府ImPACTタフ・ロボティクス・チャレンジ, 奈良先端科学技術大学院大学, 東北大学, 熊本大学, 犬の情動をリアルタイム推定するサイバースーツ, 科学技術振興機構, 麻布大学
犬の情動をリアルタイムに推定するサイバースーツと快/不快情動の判定
東北大学、麻布大学、奈良先端科学技術大学院大学、熊本大学などによる研究グループは2017年11月1日、「犬の情動をリアルタイム推定するサイバースーツ」を開発したと発表した。内閣府総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジの一環として行われた研究の成果だ。
同プログラムでは、災害の予防・緊急対応・復旧、人命救助、人道貢献のためのロボットに必要な様々な技術の研究開発を進めている。東北大学の大野和則准教授、濱田龍之介助教を中心とする研究グループでは、災害救助犬の被災者探査活動を支援するため、カメラやセンサーなどを用いた計測・認識技術により救助犬の活動能力を向上させるサイバースーツの開発に取り組んできた。探査活動中に犬の活性度が下がると、被災者の探索能力が下がるが、これまでのサイバースーツは、活動中の犬の活性度を計測し可視化することができないという課題があった。
今回同研究グループでは、心電と行動を同時に非侵襲に計測する新たなサイバースーツと、心電計と慣性センサーのデータから快/不快の情動を推定する人工知能アルゴリズム、および異なる場所で複数の人間がリアルタイムに結果を共有できる表示方法を開発した。
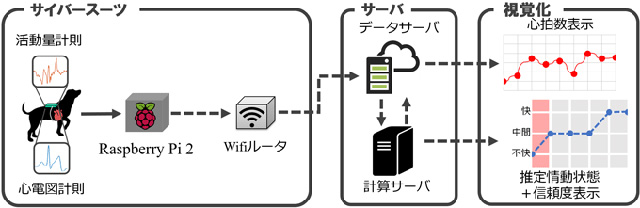
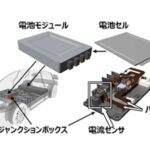
犬の情動をリアルタイムに推定するサイバースーツのシステム構成
新しいサイバースーツは、心電計測装置、慣性センサー、カメラ、マイク、GPSなどのセンサーと、センサーデータを記録/解析するオンボードコンピューター、インターネットに情報を送信する通信装置を搭載した、重さ約1.5kgの犬用ベスト。心電計測では、3つの電極を胸部から腹部に設置する必要があるが、今回、犬にインナーウェアを着せるだけで、必要な箇所の皮膚に密着して電極を設置する方法を開発した。また、ゴム素材を利用したバンドとマジックテープにより電極を表皮に密着させることで、運動時に電極が浮いてしまい計測できないという課題も解決している。
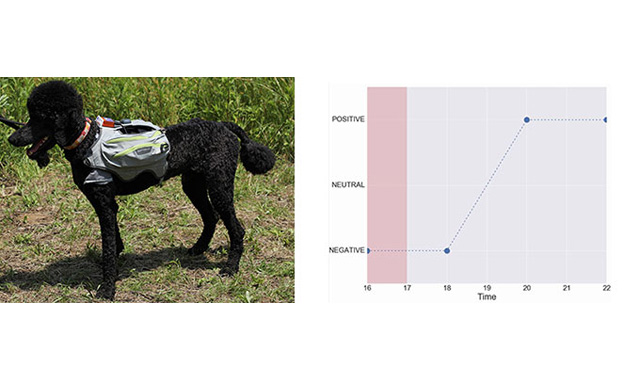
心電計測装置で計測したR波の間隔(RRI)と慣性センサーで計測した活動量は、ネットワークを介してクラウドサーバーに登録される。パソコンでクラウドサーバーにアクセスし、取得したRRIから計算した心拍変動指標(HRV)に基づき、機械学習を用いて犬の快/不快の情動を判定する。判定された快/不快の情動は、活動量に基づいた判定結果と、それが信頼できるかの判定結果とともに、端末上でリアルタイムに視覚化される。
この快/不快の情動の判定結果やRRI、犬の現在位置は、ウェブ技術を利用して開発された表示方法により、クラウドサーバーを介して、ブラウザがインストールされているタブレット端末やパーソナルコンピューターで複数の人間が同時に共有することができる。救助犬による被災者探査では、犬のハンドラーや消防隊などが、犬の探査結果を同時に共有できるようになる。
今回開発された犬用インナーウェアを利用すると、犬が活動中のRRIの計測では、従来の固定方法では活動中のR波の検出率が51.7%であったものが81.9%に改善された。また、RRIから計算したHRVに基づき、犬が静止/歩行時に快/不快情動を73.6%の精度で判定できた。ImPACTタフ・ロボティクス・チャレンジの実証実験でも、運動中の快情動の推定が可能なことを確認できたという。
今後、今回の開発技術を災害救助犬などの使役犬に応用し、探査継続に不快を覚えた時に適切に休憩をとらせ、快の時は継続して探査を行うことで、探査の信頼性を維持しつつ被災者発見を目指す。また、快/不快の情動以外の犬の情動を推定する技術にも拡張する。