- 2017-11-22
- ニュース, 制御・IT系, 製品ニュース
- T-HR3, トヨタ, トルクサーボモジュール, ヒューマノイドロボット

マスター操縦システムとT-HR3
トヨタ自動車は2017年11月21日、外部からかかる力を感じながら柔軟な動きを制御できるヒューマノイドロボット「T-HR3」を開発したと発表した。
T-HR3は、同社が開発するヒューマノイドロボットの第3世代にあたる。コア技術の「トルクサーボモジュール」は、多摩川精機、日本電産コパル電子と共同で開発してきたものだ。
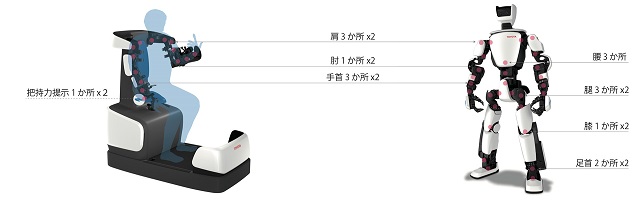
トルクサーボモジュールは、T-HR3本体の関節に29カ所、マスター操縦システムに16カ所の合計45カ所に搭載されており、高精度トルクセンサー、モーター、減速機などから構成される。トルクセンサーでトルクを感知することによって、操縦者が意図したトルクを出力できるようにモーターを制御する。これにより関節を柔軟に制御し、ロボットをしなやかに動作させることができるようになる。また、ロボットが外部から受ける力を操縦者に伝えることもできる。

また同モジュールによって、周囲の物に接触してもバランスを維持できる全身協調バランス制御や、機器同士や操縦者との接触を回避する自己干渉回避機能を実現している。
操縦は、トルクサーボモジュールやマスターアーム、マスターフット、ヘッドマウントディスプレイから構成されるマスター操縦システムから行う。ロボットに搭載したカメラからの映像をヘッドマウントディスプレイで見ながら、マスターアーム、マスターフットによって全身で直感的にロボットを操縦できる。もちろん遠隔地からの操縦も可能だ。
同社は今回の開発では、家庭や医療機関などのさまざまな場面で生活を安全にサポートするパートナーロボットを目指したという。今後はさらに災害地や建設現場、宇宙空間などで活躍するロボットへの応用を視野に入れている。