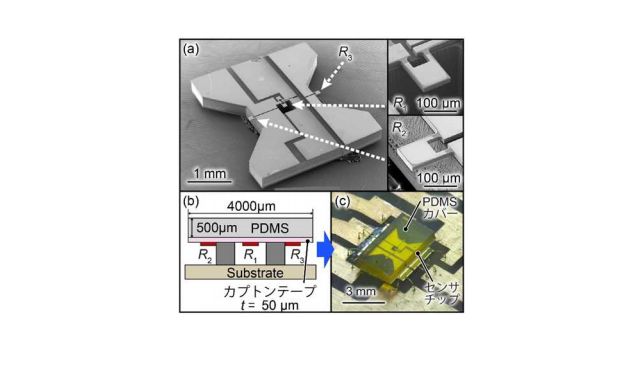
(a)試作したセンサーチップ(b)センサーデバイスの寸法(c)センサーデバイスの写真
東京大学は2018年1月23日、触るだけで物体の軟らかさを計測できる小型MEMSセンサーを開発したと発表した。
従来対象物の軟らかさを測るには、対象物に押し付けた計測器先端の押し込み量の変位と、それに働く反発力を同時に計測して求めていた。しかし、変位量と反発力を同時に計測できるような構造を小型のチップ上に作製するのは困難だった。
今回開発したセンサーは、異なるばね定数の複数のピエゾ抵抗型(変形によって抵抗値変化を出力する特性を持つ)のひずみ検知部をひとつのチップ上に配置。センサーを物体に押し付けると、これらのひずみ検知部の出力の比率から物体の軟らかさを計測することができる。試作した3×3×1mmのセンサーでは、50kPaから6MPaまでの弾性率が計測できることを実験で確認した。
同センサーは、従来の軟らかさを計測する方法と比較して、計測原理が単純で小型化に適しているという。このため、ロボットハンドの指先に搭載することで、つかむと変形するものでも適切な力で把持してハンドリングできるようになるとしている。また、手術ロボットの鉗子(かんし)の先端に搭載することで、手術中に患部の特定や組織の軟らかさの分布の計測が可能になるなどの応用も期待されるという。