- 2019-6-24
- 技術ニュース, 機械系, 海外ニュース
- 3Dプリント, Amsterdam Institute for Advanced Metropolitan Solutions(AMS Institute), AprilTag, AR(拡張現実)タグ, LiDAR, Luis Mateos, Roboat, マサチューセッツ工科大学(MIT), ロボットと自動化に関する国際会議(ICRA)2019, 学術, 自動運転ロボットボート
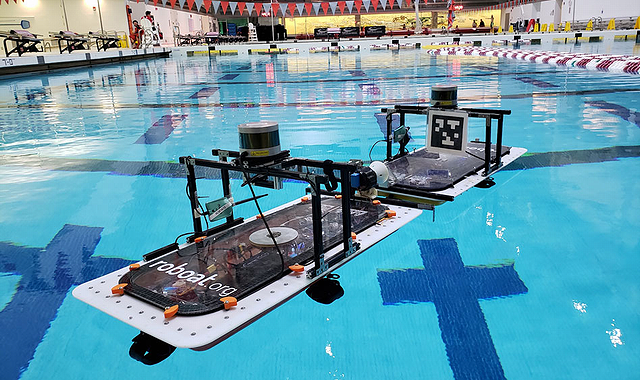
Courtesy of the researchers
米マサチューセッツ工科大学(MIT)の研究チームは、オランダのAmsterdam Institute for Advanced Metropolitan Solutions(AMS Institute)と共同で開発中の自動運転ボート「Roboat」に、新しくラッチ機能を追加したと発表した。Roboatは、自律的に航行しながら他のRoboatと連結し、失敗しても再試行する。一時的な橋の増設や、水路を利用したごみ収集システムへの応用が考えられるこの研究成果は、「ロボットと自動化に関する国際会議(ICRA)2019」で発表された。
オランダのアムステルダムは、土地の約4分の1が水で覆われ、165本もの運河が張り巡らされている。MITの研究チームは、水上に知的なモビリティを提供することを目的に、数年前から自動運転ボートRoboatを開発している。単独で航行するほか、複数が連結して浮橋となったり、都市の渋滞緩和やインフラ整備に役立てる予定だ。2016年には試作機が事前にプログラムされたルートに従い、アムステルダムの運河の航行に成功。2018年には3Dプリントで作製した1/4スケールのボートに軌道追跡アルゴリズムを搭載した。
今回試作したRoboatは、大きさ1000×500×150mmの長方形の船で、各辺の中間に4つのスラスターを搭載している。そのほか、LIDAR、カメラ、GPS、マイコンなど搭載している。
新しくRoboat同士の連結機能として、ボール部とソケット部から成るラッチ機構を開発した。ボール部は、バドミントンのシャトルコックのような見た目で、ゴム製の円錐ボディの先に金属ボールが付いている。ソケット部は、ボール部を受けやすいように漏斗型になっている。近づいてきたボールをレーザーで検知し、3本のアームでボールを捕らえてロックする。
制御にはLIDARとカメラに加え、位置基準としてAR(拡張現実)タグのAprilTagも利用。「1/4スケールのRoboatでは、突風や激しい水流に耐えられないときもある」と、Luis Mateos研究員は説明する。ただ、その場合でもRoboatが自分で判断して、船体の後退、位置の再計算、連結作業の再試行を行うという。
研究チームは、MITのプールと実際の川の両方で実験を行った。どちらの場合も、Roboat船団は約1m離れたところから駆動開始して約10秒で連結、もしくは数回再試行した後に成功している。精度はミリメートル単位だ。
今後は、フルスケールの船体を設計すると共に、ゴム製のグリッパーなど検討し、水上での安定性と牽引時の操作性の向上に取り組む予定だ。
複数のRoboatが自律的に航行し連結すれば、必要に応じて歩道橋、ステージ、ポップアップストアの設置や撤収が可能になる。また、空気や水質のデータを収集するセンサーとしても利用できる。運河を使った夜間のごみ収集という、アムステルダム特有の使用法も考えられている。