

- 2020-1-30
- 技術ニュース, 機械系, 海外ニュース
- Physics of Fluids, Xin Li, ZPD(Zero Pressure Difference/ゼロ気圧差)法, スパイダーマン, ロボット, ロボットアーム, 浙江大学, 真空吸引装置
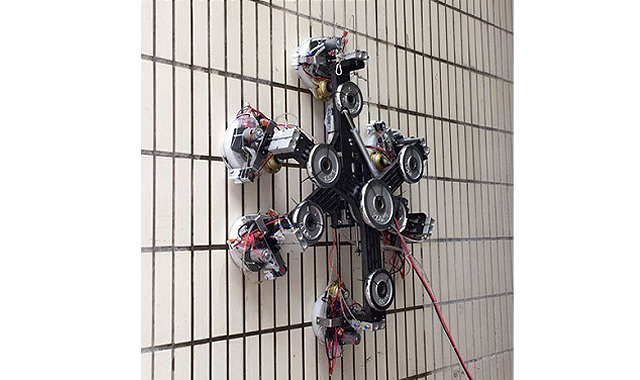
CREDIT: Xin Li and Kaige Shi
どんなに粗い表面にも吸い付くことができ、壁をよじ登るロボットや物をつかむロボットアームに応用できる吸引装置が、中国の浙江大学で開発された。
従来の真空吸引装置は、吸引対象物の表面が粗いと空気が漏れて吸引力を維持できないが、浙江大学の研究者たちは、これまでと全く異なるやり方でどんなに粗い表面にも吸い付くことができる方法を開発し、「ZPD(Zero Pressure Difference/ゼロ気圧差)法」と名付けた。ZPD法は、吸引対象物の表面と吸引カップとの間で、水を環状に高速回転させて真空を維持する仕組みだ。回転する水の遠心力により真空領域の境界では大気圧との気圧差がなくなり、真空漏れを防止する。
研究者たちは、物をつかむロボットアーム、壁をよじ登る6脚ロボット、スパイダーマン型ロボットの3つの形態でZPD法に基づく吸引装置をテストした。開発に携わった浙江大学のXin Li教授は「この吸引装置には数多くの用途があるが、壁登りロボットが最も有用だと思う。他の壁登りロボットと比較して、我々のZPDベースの吸引装置を搭載したロボットは性能面で驚くほど改善を実現している」と話す。
ZPDの詳細は、流体力学に関する科学ジャーナル『Physics of Fluids』に2020年1月14日付で掲載されている。今後について、Li教授は「研究の次のステップは、水の消費量を減らすことだ。水の消費量を減らすことができれば、吸引装置は少量の水で長時間動作でき、壁登りロボットは給水装置に接続しなくても、使用する水を自身で運ぶことができるようになるだろう」と述べている。










