東京工業大学は2020年3月3日、同大学科学技術創成研究院 未来産業技術研究所の只野耕太郎准教授らが、手術の精度と術者の負担軽減を両立する手術支援ロボットのマスタマニピュレータを開発したと発表した。より微細な位置制御が求められる手術支援ロボットへの応用が期待される。
手術支援ロボットは、術者が自らの手元のマスタマニピュレータを動かし、患者の体内に挿入したスレーブマニピュレータを操作するマスタ・スレーブ式が一般的である。同研究グループはこのマスタ・スレーブ式において、親指と人差し指でつまむピンチグリップ式と手のひら全体でマスタマニピュレータを握るパワーグリップ式を組み合わせたマスタマニピュレータを新たに開発した。
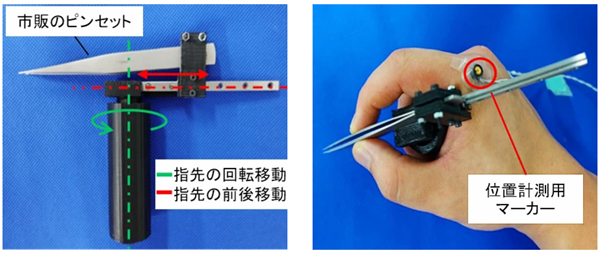
同研究グループは今回の開発にあたり、まずは親指と人差し指の指先でピンセット状になっている部分をつまみ、残りの指と手のひら全体でパワーグリップ部分を握って操作する検証モデルを試作した。
指先の方向や手のひらで握り込むグリップの距離、角度が可変であるもの、固定されたものなど4種類の検証モデルを作成し、糸を結ぶのにかかる時間および必要な動作を調べた。その結果、可変機構を持つモデルがタスクに要する時間も動作も少ないことが明らかになった。
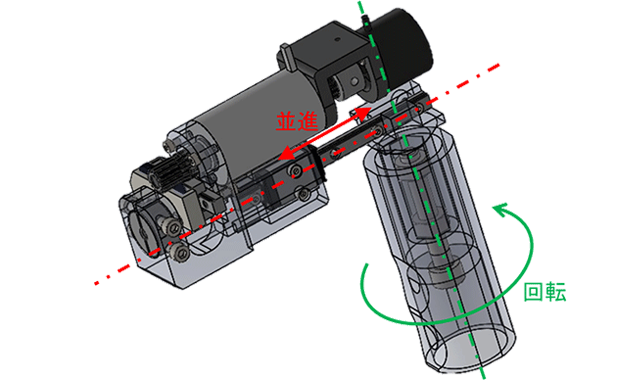
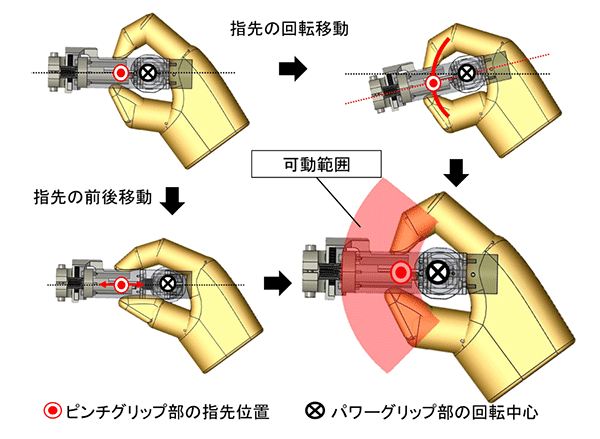
そこで同研究グループは、ピンチグリップとパワーグリップを組み合わせ、指先とパワーグリップ部の角度と距離を変えられるグリップ機構を開発した。このグリップ機構は、パワーグリップ部から30~50mmの範囲内では腕を動かさずに前後左右に指先を動かすことができる。
今回開発されたマスタマニピュレータと従来のパワーグリップ式およびピンチグリップ式のマスタマニピュレータの位置制御操作性能を比較した。マニピュレータの先端などを操作し、事前に指定した位置に対してどの程度正確に向かうことができるかを調べることで、位置制御の性能を評価する「ポインティング実験」を行った。また、マスタ機の動作をスレーブ機の動作に縮小して変換する比率(スケールファクタ)がスレーブ機の位置制御に与える影響についても検討した。
その結果、パワーグリップ式ではマスタ機からスレーブ機への動きのスケールファクタが大きい場合、ピンチグリップ式では小さい場合にそれぞれ失敗の頻度や所要時間、手の移動距離による操作性評価が比較的優れる傾向であったのに対し、新たなマスタマニピュレータではいずれの場合でもより優れたパフォーマンスを示した。
この比較結果は、新たなマスタマニピュレータがパワーグリップ式、ピンチグリップ式それぞれの長所を兼ね備えているとともに、人の手が本来有している器用さを活かすことで微細なスケールにおける作業が可能となることを示唆している。