- 2020-5-26
- 機械系, 研究・技術紹介, 電気・電子系
- Lucia-G(ルチア・緑), Lucia(ルチア), くるみ, 三枝 亮, 不気味の谷, 介護医療コンシェルジュロボット, 介護医療支援ロボティクス, 感覚運動統合・感性情報処理, 機械学習・認知発達システム, 神奈川工科大学, 身体拡張インターフェース

神奈川工科大学創造工学部 ロボット・メカトロニクス学科 三枝 亮 准教授
少子高齢化が進んでいく社会において、介護、医療、福祉の人材不足は避けては通れない大きな社会問題になっています。こうした状況に対応する一つの手段として、ロボットによる省力化の研究が進んでいます。これらの現場で人とロボットが共存して触れ合うとき、そのあるべき姿はどのような形になるのでしょうか。
今回は「人と機械の共生」をテーマに、機械が体を持つことでどのような知能や心が創られるのか、ロボットと共存することで人の心や体はどのように発達、進化するのかを研究している、介護医療コンシェルジュロボット「Lucia(ルチア)」を開発した神奈川工科大学創造工学部 ロボット・メカトロニクス学科 三枝 亮 准教授にお話を伺いました。(執筆:後藤銀河)
――人間機械共生研究室では、どのような研究をされているのでしょうか。
[三枝准教授]当研究室では、ロボットが人間から行動を学び、人間もロボットと共に成長していくような、人間と機械の共生的な行動と発達の方法について研究しています。これは人間の生活の中にロボットや人工知能が入ってくるとき、それらの人工物と人間の、より良い共生関係の在り方を研究する、ということです。

人間と機械の共生的な行動と発達の方法が研究テーマ
[三枝准教授]具体的な研究テーマとして、「介護医療支援ロボティクス」、「身体拡張インターフェース」、「機械学習・認知発達システム」、「感覚運動統合・感性情報処理」を手掛けています。人工知能・ロボットの数理や人間の生理/心理に基づいた理論を構築し、医療、介護、教育、製造、サービス分野の実問題に適用して検証することで、人間と機械の共生の在り方を明らかにしていきます。今回は、介護、福祉、医療の現場で活用できる支援ロボットの開発を中心にお話したいと思います。
介護医療コンシェルジュロボット「Lucia(ルチア)」

介護医療コンシェルジュロボット研究モデルLucia-G(ルチア・緑)。高齢者でも親しみが持てるようにディスプレイに表情を与え、ボディ外装は柔らかい素材で覆われている。
[三枝准教授]これは、介護医療コンシェルジュロボット「Lucia-G(ルチア・緑)」です。この機種は試作研究モデルで、「人応対機能」、「見回り機能」、「遠隔操作機能」、「バイタル運動計測機能」といった、介護/医療の現場で働く人たちの負担を軽減するための様々な機能を搭載していて、デザイン面も高齢者や子供が親しみやすく、怪我をしないように柔らかく、触りやすいデザインを実現しました。
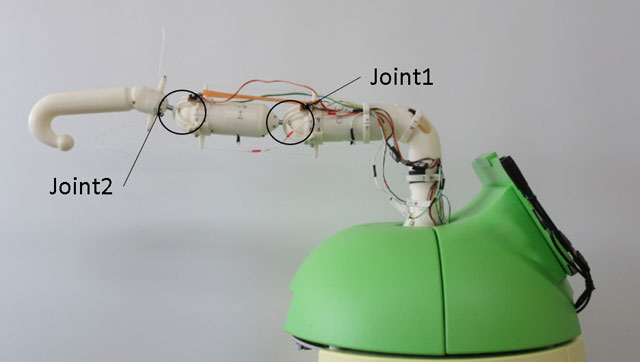
――ディスプレイ上の目と口で表情を再現しているのですね。ボディの上部の青いカバー部分にあるのはアームでしょうか。
[三枝准教授]ルチアには、様々な「バイタル計測装置」が搭載されています。このアームにセンサーが内蔵されていて、障がい者や高齢者の方がアームの部分を握るだけで、脈拍や血圧といったバイタルを測定することができます。他にも、カメラを使った画像認識機能もあり、介護施設を自動巡回しながら、ディープラーニング技術でカメラ画像の中から人の顔を認識し、サーモセンサーで顔の部分の体温を測定が可能です。そこで、もし体温が高かった場合は「大丈夫ですか?」と自ら問いかけて、その会話のやりとりを記録して、バイタルデータとともに職員に送信することができます。

介護施設などを自律的に走行しながら、アームやカメラを使って複数の利用者のバイタル計測を行うことができる。
[三枝准教授]施設内の夜間巡回中に、もし倒れている人を見つけた場合、カメラを使って呼吸の状態を表している胸郭の変動を見て、それを安否確認情報として職員に通知するような機能も備えています。夜間に徘徊している方がいたら、追従モードで後を追い、状況を記録しつつリアルタイムで情報を転送することで、行方不明を防止することも可能です。
また、ルチアの特徴として、「リハビリ支援機能」があります。例えば、高齢者によくみられるパーキンソン病は、手足の震えや筋肉のこわばりなど、運動機能に障害が現れる病気で、症状の一つにいったん立ち止まると足が動かせなくなる「すくみ足」があります。この症状は、視覚的や聴覚的な刺激で運動をアシストする、つまり音と光で患者さんを誘導すると、スッと足が出るようになります。療法士の先生によるリハビリでは、歩行器などを使いながら、テンポよく声をかけて患者さんを誘導しているのです。

ルチアで床面に足を置く場所を投影し、タイミングよく音を出すことでリハビリ支援が可能
[三枝准教授]音と光をテンポよく発信する、という機械的な動作はまさにロボットが得意とする分野。このリハビリにルチアを使えば、ルチアのアームと手をつないだ状態で、床面に足を置く場所を投影し、正確なタイミングで音を出すことで、それが刺激になって足が前に出るようになります。このように、療法士の負担を減らして、人と同じように患者さんの歩行練習を支援することができるのです。

ロボット掃除機のように、電源を自動で管理して、ステーションに戻って充電する。
現場主義で真のニーズを探し出す
――人に代わってリハビリの対応もできるのですね。ルチアはどのように開発を進めてきたのでしょうか。
[三枝准教授]このモデルは以前、豊橋技術科学大学に在籍していたときに、「知の拠点あいち重点研究プロジェクト」という産学行政の共同研究開発プロジェクトの中で開発したものです。作りあげた試作機は協力いただいている介護/医療施設に持ち込ませてもらい、実証実験を繰り返して、現場のニーズを機能として実装してきました。
介護/医療施設で実験をさせてもらうときは、私を含めた研究室のメンバーや協力企業の方も、その施設の人たちと同じ食事を食べ、寝泊まりして、現場の使用感を確認しています。ロボットの顔の部分にモニターを内蔵し、親しみやすい外観にしていることもあって、現場では話しかけてくる方も多いです。施設利用者の方々とのコミュニケーションのきっかけになることで、利用者ご本人の認知機能や施設全体の活性度が高まればいいなと考えています。
私の研究室には、本物の介護ベッドを設置した介護/医療現場のモデルルームを作っていて、予め機能の確認や検証ができるような環境は整えていますが、やはり現場で使ってみないと分からないことがあります。この研究試作機の実験結果をもとに、神奈川工科大学に移って、知の拠点あいち重点研究プロジェクトの参画メンバーと量産モデル「くるみ」を開発しました。

量産モデルの「くるみ」(手前)には、ルチアの「夜間巡回機能」が搭載されている。
[三枝准教授]試作モデルのルチアは、多機能ということもありとても高価なため、量産モデルの設計にあたっては、実際の現場で必要な機能、要望を確認し、量産向けに使いやすい部品を選ぶなど、コストダウンを図りました。機能は「夜間巡回機能」に絞り、量産化は協力企業へ技術移転して対応いただき、試作から量産化まで3年程で実現することができました。
――今、「くるみ」が「瞬き」しました。
[三枝准教授]人間の瞬きの周期は、だいたい5~6秒を中心に正規分布しているので、くるみにもそうした機能を実装しています。実は、リハビリ支援やバイタル計測など、いろいろな機能を苦労して開発して持ち込んでも、利用される方に感想を聞くと「目が可愛い」と言われて。苦労して実装した機能だったのですが、人はそこを見るのかと(笑)。でもこれは、それだけ目が大切だということの裏返しなのです。先ほど、現場じゃないと分からないことがあるとお伝えしたのが、こうした利用者の反応なのです。目が可愛いといわれても決して挫けずに、そこに重要なポイントがあると捉えています。

人と関わり合う次世代ロボットでは、親和度を高めるようなデザインが大切と語る三枝氏。
[三枝准教授]顔がないロボットは機能を知らない人間からみると、どう動くか分からないんです。ところが、顔があるロボットがこれから動こうとする方向に目を動かすことで、それを見た人は、次の瞬間にロボットがどう動くかが分かります。狭い廊下で人とロボットがすれ違うようなケースでも、ロボットが目配せしてから動くことで、うまくすり抜けられます。これが、顔がないロボットが向こうからガーッと走ってきたら、思わず後ずさりしてしまいますよね。
またヒューマノイド型のロボットでは、人間との類似度が高くなると親和度も高くなっていくのですが、ある地点までいくと親和度が急激に下がるポイントがあります。これは、人間によく似た人形を気味が悪いと感じるのと同じ原理で、その後、本当に人間と見分けがつかなくなると、また親和度は高まります。その親和度が急激に下がる地点を「不気味の谷」と呼んでいますが、くるみのデザインは、この谷の手前で止まるようにしています。
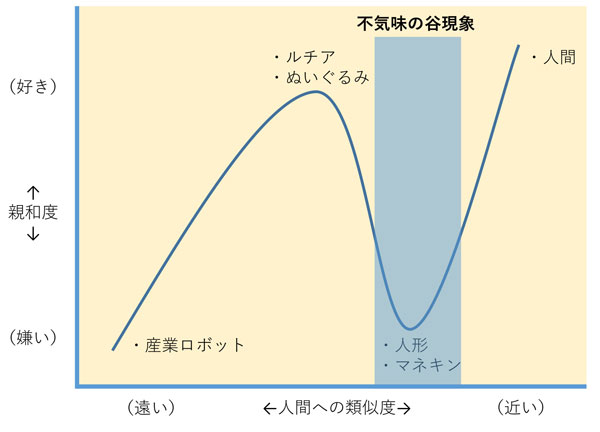
人形やマネキンなどは、人に似すぎることの逆効果もあるという。
[三枝准教授]目の大きさや会話の仕方、触ると柔らかかったり、温かかったり、そういう部分は残しつつ、人間には似せ過ぎないようにすることで、拒否率を低く抑えるようにしています。
――さまざまな工夫が施されているのですね。でも、このような介護医療ロボットを開発されたきっかけはなんだったのでしょうか。
[三枝准教授]私はもともと、シュレディンガー方程式とかラグランジュ方程式を扱うような物理が専門でしたが、人間の知能というものに興味を持ち、物理の中の情報工学の研究室に進み、機械学習で学位を取りました。
人間の知能がどのようにできたのかを考えたとき、人間は物理空間とのインターフェースとして身体を持っていて、その身体を通して、時間や距離といった物理空間の制約を受けていると言えます。このような物理的な制約をいかに回避するかを考えるために、知能が生まれたというのが私の仮説です。つまり、人間型の知能を作るためには物理空間の制約を受ける身体が必要で、それを研究するために、機械学習からロボットへと移ったという流れです。最初は人の動作を見て学習し、自分の動作として模倣するロボットを作りました。
――人間の真似をするロボットということですか?
[三枝准教授]人間のように学習するロボットですね。ロボットが自分でモーターを使って身体を動かす場合に得られる情報は、モーターの動きを読むエンコーダーの情報、そしてカメラから得られる視野の情報があります。これらの情報が時間的に相関したときに、自分が動かしたという認識が生まれます。例えばカメラの前にボールを転がしても、得られる情報に相関がないので、ボールを自分の身体とは認識しません。ところが自分で腕を動かしたときは、腕からの変化信号と視野の中で腕が動いているというフィードバックが時間的に相関するため、学習が進めば自分の身体の定義ができて、腕の動かし方も分かってくる。
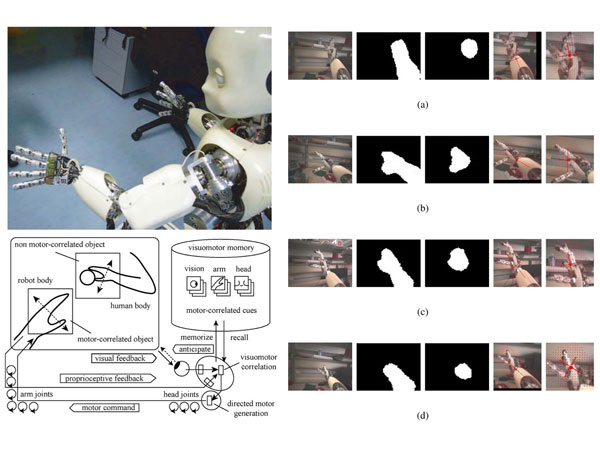
ロボットが運動と視覚・体性感覚の時間相関より自分の身体を学習する。
[三枝准教授]身体が定義できて、自分の身体の基本動作ができたところで、ロボットに対して物の動かし方を見せてやったりすると、ロボットは自分のレパートリーである基本動作に分解して、自分の動きに置き換えて、再構成してモーター出力するわけです。真似をするというのはこういう仕組みです。知能のレベルとしては、人間で言えば生後10カ月くらいの知能ですが、私がプリセットすることなく、自己学習によって取得することができました。
人間と機械が共生することで、より高いステージへと進化できる

人間と機械が共生することで、さらに先へと進化できる可能性が生まれる。
[三枝准教授]人間がロボットを教育して動かせることが分かったので、次にその逆をやってみようと思いました。つまり、人間がロボットから学習する、そのひとつのテーマがリハビリだったんですね。ロボットが療法士の先生と患者さんの間に入って、誘導の経路を教えたり、足を動かす歩幅やタイミングを決めたりし、それをロボットが学習して患者さんをガイドし、トレーニングする、その結果を記録してフィードバックする。人間と機械がお互いを補うように学び合うことで、双方が進化できるのではないか。人間と機械が共生することで、より高いステージへと進化できるのでは、と考えています。
――人間の仕事を置き換える、取って代わるのではなく、サポートするというイメージですか?
[三枝准教授]私は、人間ができることをロボットがやってもあまり意味がないと思っています。ロボットを人間と共存するパートナーとして考えると、人間らしいというよりは、人間のことが分かっている、という点が重要になると思います。
クマノミとイソギンチャクのように、まったく違う生物が一緒に生きていることで身を守ったり、エサを手に入れる、相利共生という関係があります。これと同じように、ロボットは一番能力を発揮できるところで役に立つべきで、人間にしかできないことは人間がやる。これが顕著に表れてくるのが医療、介護、福祉の現場なのです。
ロボットは計測や記録、情報処理や物理的作業は得意ですが、人間のように心の中を読み取ったり、相手の心理を考えたり、統合的に物事を理解して診断や医療的な判断をすることはできません。また、人に接する、声をかけるという点も、やはりロボットには難しくて、ここは人が一番力を発揮するところです。ロボットは周辺業務をやったり、リハビリするときの運動を細かく計測したり、人とロボットの個性が調和するよう共生する。私の研究テーマである「人間と機械の共生的な行動と発達」とは、人だけでは到達できないこともロボットがともにいることで到達できるようになる、という趣旨なのです。
ロボットがいることで、人がどう変わっていくのか。人間が作った道具に「知能・意識」が備わったわけで、今までの道具とは明らかに質が変わりました。この人間から派生した知性体と人間がうまく調和できると、知的ステージはサルからヒトに進化したように、次の段階へと進化できる可能性があるのでは。そうしたことも共生関係の中から読み解かなければと思っています。
学生には「まずやってみてから興味を持つ」を実践してほしい
――ロボット開発のためには、先生の研究室に所属する学生たちにも幅広い知識が求められると思います。
[三枝准教授]ロボット開発は、ロケット開発や宇宙開発と似ていると思っています。ロケット開発や宇宙開発は、機械工学や制御工学、宇宙空間に人間が行くときの生理や動物実験、医学など、複数の専門家が必要な統合的な分野で、それ自体は専門分野ではないように思います。ロボット開発も同じように、情報工学者、電気工学者、機械工学者、そしてデザイナーという、複数の専門家が必要な分野なのです。
私の研究室は、まだ研究室ができて2年なので院生はいなくて、学部生が6人、スタッフが4人です。学生もメカトロ、制御システムなどがベースになっていますが、福祉工学や臨床工学なども人によっては必要になるので、比較的広い知識を学んでいただいています。
また、学内では広く1年生から3年生まで参加できる研究プロジェクトとして、展示用のロボットを作っています。そこに参加した学生に報告書まで作成して発表してもらい、単位を付与していますが、早くから興味を持ってくれた学生には、その後研究室でさらに知識を深めていくことができるようにしています。
――学生たちに向けてメッセージをお願いします。
[三枝准教授]皆さんにお伝えしたいことは、物事に対して、興味を持つからやるのではなく、まずやってみてから興味を持つ、という意識を持っていただきたいということ。物事への興味とは、やり込んでいかないと分からないものですし、やってみて初めて面白さが分かる、ということもあります。そうした意識で行動を起こすことが、皆さん自身の興味を見つけることにつながり、その興味が社会全体をより良くしていくのだと思います。

関連リンク
神奈川工科大学
ロボット・メカトロニクス学科 人間機械共生研究室

ライタープロフィール
後藤 銀河
アメショーの銀河(♂)をこよなく愛すライター兼編集者。エンジニアのバックグラウンドを生かし、国内外のニュース記事を中心に誰が読んでもわかりやすい文章を書けるよう、日々奮闘中。