- 2020-9-30
- 技術ニュース, 機械系, 海外ニュース
- Marina Pilz da Cunha, アイントホーフェン工科大学, アクチュエータアセンブリ, サンゴ, ポリジメチルシロキサン, ワイヤレス水中ソフトロボット, 人工水中ポリプ, 光応答性液晶ポリマーフィルム, 学術, 米国科学アカデミー紀要(PNAS)
オランダのアイントホーフェン工科大学を中心とする研究チームは、水中から汚染物質を除去できる1cm×1cmのワイヤレス水中ソフトロボットを開発した。サンゴを構成している個体であるポリプの構造に着想を得たもので、人工ポリプを撹拌してターゲットを引き寄せる胴体部分と、光応答によりターゲットを捕捉、解放する触手部分から成っている。汚染物質の除去以外に、特定の細胞の捕捉や運搬を助けることで医療診断装置にも利用できる可能性がある。研究成果は、『米国科学アカデミー紀要(PNAS)』に2020年7月28日付で公開されている。
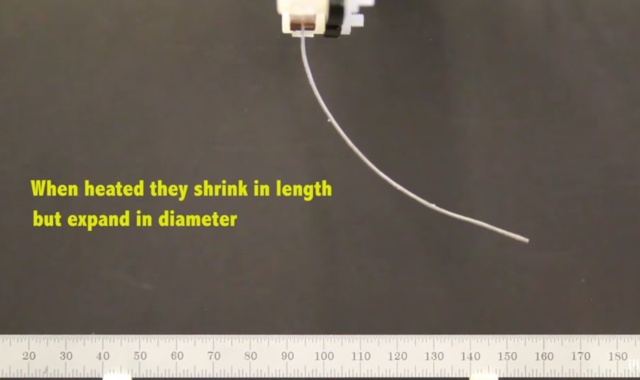
サンゴは、触手と体の幹となる部分を持つ動物であるサンゴポリプの群体だ。ポリプの柔らかい体の働きによって、自ら海中で水の流れを作り出し獲物が近づくのを助ける。研究チームが開発した人工ポリプは、柔軟性があり磁気制御が可能なポリジメチルシロキサンと、光応答性液晶ポリマーフィルムという2つの異なる刺激応答性材料を組み合わせたものだ。
磁気によりポリプの胴体部分を回転することで水流を生み出し、油滴などのターゲットを人工ポリプに向けて誘導する。ターゲットが近づいたら、紫外線を利用してポリプの触手を活性化しターゲットを補足する。ターゲットを放す際にはブルーライトを照射する。また、人工ポリプの3Dシミュレーションがターゲットを引き付けるための水流発生の解明に重要であり、触手形状の最適化に活用された。
開発された人工ポリプは、複数の独立したデバイスセグメントをそれぞれ制御することで、水中でのターゲットの誘導、捕獲、解放という異なるタスクを実現した。アイントホーフェン工科大学のMarina Pilz da Cunha氏は、「人工水中ポリプは、アクチュエータアセンブリの可能性を実証するためのコンセプト証明であり、将来のデバイスへのインスピレーションを与えてくれます」と述べている。