- 2020-12-13
- 技術ニュース, 機械系, 海外ニュース
- ANYmal, ETH Zurich(スイス連邦工科大学チューリッヒ校), コンタクト, シングルタスクフォーミュレーション, ホイール走行, リフトオフタイミング, ロボット, 歩行
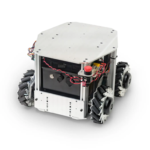
ETH Zurich(スイス連邦工科大学チューリッヒ校)は、歩行とホイール走行のコンビネーションで長距離の省エネ移動ができるロボット「ANYmal」の動画を公開した。動画では、歩行と脚の先端に装着したホイール走行により未舗装の道を移動したり、障害物を越えたりするダイナミックで器用な動きを披露している。
これまでの4足歩行ロボットは、起伏のある地形でも移動出るメリットはあるが、ホイールシステムによる移動に比べエネルギー効率が劣る課題があった。そこで同校は、歩行とホイール走行の特性を融合することで、トレードオフすることなく移動性と効率性の両立に成功した。
歩行とホイール走行の融合によるハイブリッド動作のデザインは、高い自由度に加え、参考になる動作が自然界に存在しないため困難を極めたという。開発チームが取り入れたのが、シングルタスクフォーミュレーションとしての全身モデル予測制御で、ホイールとロボットの胴体の動きを同時に最適化した。すべての動作は単一系列のパラメーターで設定するため、全身最適化により多様な自律移動が可能になる。
また、歩行とホイール走行の選択がエネルギー消費の削減量を大きく左右することを確認。ANYmalは、コンタクトやリフトオフタイミングを前もって定義しなくても、自ら効率的な歩行シーケンスを導けるため、あらゆる地形を秒速約4mで長距離移動できるとしている。