- 2021-6-15
- 技術ニュース, 機械系, 海外ニュース
- Michael Shafer, Science Robotics, ねじれ高分子アクチュエータ(TPA), アクチュエータ, カヴァタッピ人工筋肉, ソフトロボット, ノーザンアリゾナ大学(NAU), ポリマーチューブ, 人工筋肉, 学術
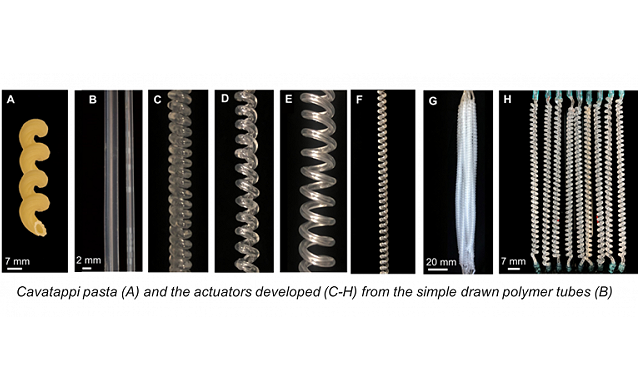
米ノーザンアリゾナ大学(NAU)の研究チームは、柔軟で低コスト、高効率の人工筋肉を開発した。ねじれたパスタのような形のアクチュエータは、人間の骨格筋をしのぐ性能も見せた。ソフトロボットや歩行ロボットのほか、外骨格や義肢といったアシスト技術への適用が期待できる。研究結果は、2021年4月21日付けの『Science Robotics』に掲載されている。
人間の筋肉の動きを模倣し、人間よりも優れた性能を目指すロボットシステムにおいて、柔軟なアクチュエータの開発は重要だ。従来の電気モーターや油圧ピストンといったアクチュエータは、高性能だが剛性が高すぎて、人間と共同で作業したり、人間の動きを支援したりする作業に向いているとは言えないからだ。
今回研究チームは、比較的安価なポリマーチューブを使って、流体駆動のアクチュエータを開発した。ポリマーチューブを引き延ばし、ねじってらせん状にしている。「形状がパスタのカヴァタッピに似ているので、カヴァタッピ人工筋肉と名付けることにした」と、Michael Shafer准教授は名前の由来を語る。
カヴァタッピ人工筋肉は、ねじれ高分子アクチュエータ(TPA)をベースにしているという。「TPAはパワフルで軽量、安価であり、革新的なものだ。しかし、TPAには加熱と冷却が必要なため非常に効率が悪く、動作が遅かった。効率はわずか2%しかない」と、Shafer准教授。そこで研究チームは人工筋肉の収縮効率と応答速度を上げるため、熱ではなく、油圧または空圧を利用して駆動させることにした。その結果、収縮効率は最大約45%と、ソフトアクチュエータとしては非常に高い数値を実証できた。また、単位質量当たりの仕事量とパワーはそれぞれ、0.38kJ/kg、1.42kW/kgとなった。これは、人間の骨格筋と比べるとそれぞれ10倍、5倍の性能にあたるという。研究チームは、開発を続ければ、さらに性能を上げられると考えている。
Shafer准教授は「カヴァタッピ人工筋肉には、簡単、低コスト、軽量、柔軟、効率、そしてひずみエネルギー回復特性といった利点がある。今後、多くの用途への利用が研究されると期待している」と語っている。