- 2021-6-17
- 制御・IT系, 技術ニュース, 海外ニュース
- Nature Materials, カリフォルニア大学サンタバーバラ校, カリフォルニア大学ロサンゼルス校, ノースカロライナ州立大学, ロボット, 学術, 弾性流体潤滑(EHL:Elastohydrodynamic Lubrication)摩擦, 摩擦, 物理法則, 触覚デバイス
幅広いロボット技術の発展につながることが期待される、摩擦に関する新しい物理法則が発見された。遠隔手術や製造業などの分野で応用でき、より信頼性が高く機能的な触覚デバイスやロボット装置開発への道を開くものだという。この研究は、ノースカロライナ州立大学、カリフォルニア大学サンタバーバラ校、カリフォルニア大学ロサンゼルス校の研究者らによるもので、2021年4月29日付で『Nature Materials』に掲載された。
摩擦が重要である理由の1つは、摩擦のおかげで私たちは物を落とさずに持つことができるということだ。人間にとって摩擦を把握することは直感的なことであり、石けんだらけの食器を手にしている場合ですらそうだ。一方、組み立てラインから医学まで、あらゆるところでロボット装置が活躍しているが、ロボットが物体をつかむときに生じる摩擦、特に湿った環境での摩擦を説明するのは難しかった。
問題となっているのは弾性流体潤滑(EHL:Elastohydrodynamic Lubrication)摩擦と呼ばれるもので、2つの固体表面が液体の薄い層を挟んで接触したときに起こる摩擦だ。私たちが指先をこすり合わせたときに起こる摩擦も、皮膚の表面には自然に存在する油分の層があるので、これに該当する。このような摩擦は、油でコーティングされた物体を持ち上げるロボットの爪や、人間の体内で使用される手術器具などでも当てはまる。
今回の研究では、このような摩擦を説明する新しい物理法則が発見された。この法則は、EHL摩擦を制御する材料の開発に必要となるフレームワークであり、多様なパターンや材料、動的な動作条件に一律に適用できるものだ。
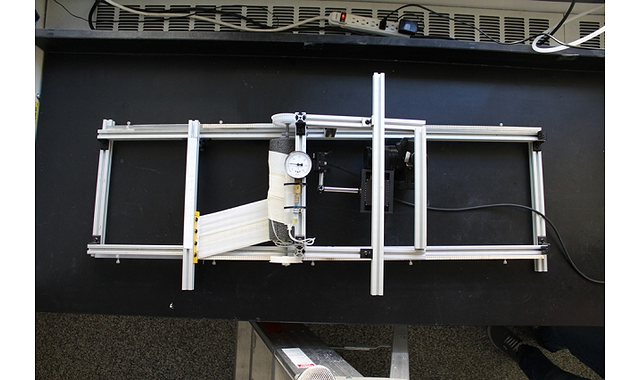
この新しい物理法則は、4つの方程式を用いて、EHL摩擦を理解するため、作用する全ての物理的な力を説明する。論文では、人間の指、生体模倣ロボットの指先、トライボレオメーターと呼ばれる摩擦測定器の3つでこの法則を実証した。今回開発されたモデルは、生体模倣ロボットの指先と人間の指のEHL摩擦を正しく予測できた。
この法則はEHL摩擦を説明するために使うことができ、物体の表面にパターンがあれば、どんな多様なソフトシステムにも適用できる。ここでいう表面にあるパターンとは、人間の指先のわずかに盛り上がった表面からロボットツールの表面の溝まで、あらゆるものが当てはまる。
研究結果は、製造工程を確実に処理するため微妙な制御をするロボットハンドで非常に有用だという。また、外科医がロボット器具を遠隔操作して外科手術を行うような遠隔手術分野でも明らかに応用できる。
この研究は、触覚を理解して人工システムで触覚を制御するための基礎的な進歩であると研究者らは考えており、摩擦を触覚信号にエンコードする新しい方法を開発することもできるとしている。