- 2022-2-16
- ニュース, 技術ニュース, 機械系
- iLQG(iterative Linear-Quadratic-Gaussian), PU-ラーニング(Positive and Unlabeled Learning), アシストロボット, ガーディアンロボットプロジェクト, ロボット, 動作支援, 国際電気通信基礎技術研究所(ATR), 機械学習, 理化学研究所, 研究, 装着型
理化学研究所は2022年2月15日、同研究所情報統合本部ガーディアンロボットプロジェクトの研究チームらの共同研究グループが、膝関節に着用する軽量の「装着型アシストロボット」を開発したと発表した。装着者の動作意図を推定し、運動を支援するものとなっている。
近年研究開発が進んでいる装着型アシストロボットの駆動においては、生体センシング情報から装着者の動作意図を推定してコントロールする手法が注目されている。一方で、これまでは対応可能な動作の数が少なく、また支援対象ではない動作に対しても誤って支援を開始してしまうケースがあり、多様な動作に対応できる手法が求められていた。
共同研究グループは今回、カーボン樹脂を用いたフレームに「空気圧人工筋アクチュエーター」を内蔵し、膝関節をサポートする外骨格型の装着型アシストロボットを開発した。同アクチュエーターは、国際電気通信基礎技術研究所(ATR)の研究グループが開発したもの。開発したアシストロボットは片足810gと軽量でありながら、最大トルクが52Nmに達している。
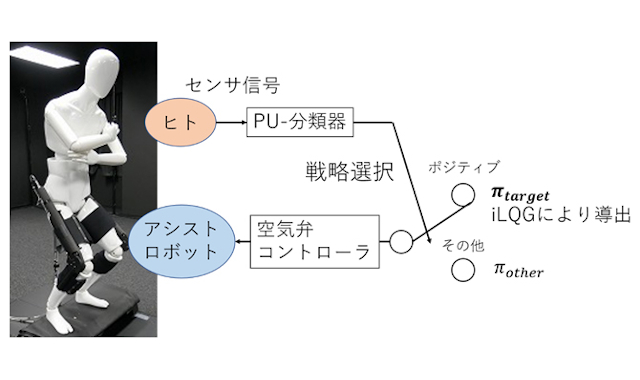
次に、同ロボットの駆動に向けて、さまざまな動作の中からいくつかの動きを支援する選択的支援のアルゴリズムを考案した。装着者の筋活動と関節運動のセンサー信号から、支援対象の動作意図を高精度で推定する「機械学習技術」と、対象動作に対してパーソナライズした適切な支援量を算出する「最適制御技術」を組み合わせている。
機械学習では、「PU-ラーニング(Positive and Unlabeled Learning)」というフレームワークを援用した。支援対象の動作と類似した紛らわしい動作データを取得し、その一部に支援対象となるポジティブラベルを付与、他のデータに対してはラベルを付与しないで学習させることで、推定器を作成している。これにより、紛らわしい動作を高精度で判別する動作意図推定が可能となった。
支援対象動作に対する制御則(πtarget)には、最適制御技術「iLQG(iterative Linear-Quadratic-Gaussian)」を用いた。装着者の身長や体重などの身体データをベースとし、物理シミュレーター上でヒトの多関節近似モデルを構築、事前に取得した支援対象の動作軌道に合わせて設定した評価関数を最適化することで制御戦略を算出した。
装着者の動作意図をポジティブと推定した場合は、支援対象動作に対するπtargetでロボットを駆動させ、ポジティブではないと推定した場合は、装着者の動きを妨害しないようにロボットの重さを打ち消すπotherで駆動させる。冒頭の画像の右側がそのイメージとなっている。
被験者数名の協力のもと、実際に動作支援実験を実施した。椅子からの「立ち上がり」動作を支援対象とし、紛らわしい動作として「脚を組む」「少し離れた物に手を伸ばして取る」「座り直す」の動作が生じうる状況を設定した。装着者の筋活動および関節角度のデータを取得し、提案アルゴリズムによってロボットを駆動させている。
その結果、立ち上がり動作に対しては100%の確率でπtargetが選択され、他の動作に対しては83.4%の確率でπotherが選択された。一方、支援対象以外の動作を行わないとする従来の手法(従来手法1)では、立ち上がり動作に対し100%の確率でπtargetが選択されたものの、他の動作に対してπotherが選択される確率が19.8%に留まっている。
また、支援対象以外の動作に対してネガティブラベルを付与したデータにより推定器を学習させる従来手法(従来手法2)を用いたところ、他の動作に対して94%の確率でπotherが選択されたものの、立ち上がり動作に対してπtargetを選択する確率が34%に留まった。
さらに、力センサーの値によりロボットによる動作支援の程度を比較したところ、提案手法と従来手法1では、従来手法2より優位に支援量が伝わることが判明した。また、本来の関節軌道との誤差を用いて、他の動作時にロボットが装着者の動きを妨害したかどうかを比較したところ、提案手法と従来手法2では、従来手法1より誤差が小さいことが判明した。
これらの結果から、従来手法1および2と比較して、今回考案した手法が装着者の動作意図を高精度に推定可能であることが確認された。
今後ウェアラブルセンサーが普及し、より多様な運動データを収集できるようになることで、今回の手法の実用化に繋がることが期待される。