- 2022-2-18
- 技術ニュース, 機械系
- CNRS, sixth finger, フランス国立科学研究センター, 人工指, 人工身体, 人工身体部位, 研究, 電気通信大学, 電気通信大学大学院情報理工学研究科
電気通信大学大学院情報理工学研究科の宮脇陽一教授らの研究グループは2022年2月14日、フランス国立科学研究センター(CNRS)と共同で、身体の他の部分から独立して動かせる人工指「sixth finger」を開発し、自らの身体の一部として取り込む(身体化する)実験に成功したと発表した。sixth fingerの使用に短時間慣れることで、身体化したときに起こる感覚と行動の変容を世界で初めて捉えた。
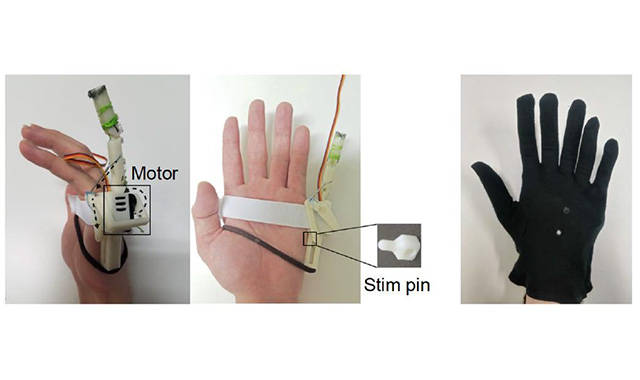
研究グループは、他の身体部位の機能や動きと独立して制御でき、手のひらに装着できる小型の人工指システムで、腕の筋肉の電気活動で制御できるシステム「第6の指(sixth finger)」を開発した。
sixth fingerは、センサーで腕の筋肉の電気活動を計測し、指を曲げ伸ばしするときに通常生じる腕の筋肉の電気活動とは異なる特定の信号パターンとなったときに動くように設計。この設計により、sixth fingerを自身の指の動きや他の身体部位の動きと独立して動かせる。
次に、sixth fingerの使用に慣れたあとに、どのような感覚や行動の変化が起こるかを実験的に確かめ、成人被験者18名から実験データを取得。sixth fingerを装着して、自身の指とsixth fingerの両方を使って指の曲げ伸ばしやキータッピングをする習熟タスクを平均1時間程度実施し、習熟タスクの前後で、sixth fingerを外した状態で、人工指に対する感覚を問う主観評定課題と、人工指の影響が及ぶ可能性がある手の感覚を評価する行動実験を実施した。
また、sixth fingerが被験者の意図とは関係なくランダムなタイミングで動いてしまう条件でも実施し、sixth fingerの身体化の効果を検証した。その結果、参加した全ての被験者が思い通りにsixth fingerを動かせることがわかった。全ての被験者は、実験前の調整段階で直感的にsixth fingerを動かすことができた。自分の意図通りにsixth fingerが動かせているという行為主体感は、制御可能条件のほうがランダム条件より有意に高くなった。
行為主体感以外の主観評定と行動実験の指標では、制御可能条件とランダム条件の間で有意な差がなかったが、sixth fingerが自身の身体の一部であると感じられている度合いが高い被験者ほど、sixth fingerを装着していた手の小指の位置に対する感覚のばらつきが大きかった。これは、sixth fingerが身体化すればするほど、sixth fingerを装着していた手の端(小指側)の位置感覚が曖昧になってくるということを示している。
こうした検証の結果により、sixth fingerの利用によって、世界で初めて、他の身体部位と独立制御できる人工身体部位を自己の一部として身体化でき、自由自在に動かせることを実験的に立証した。
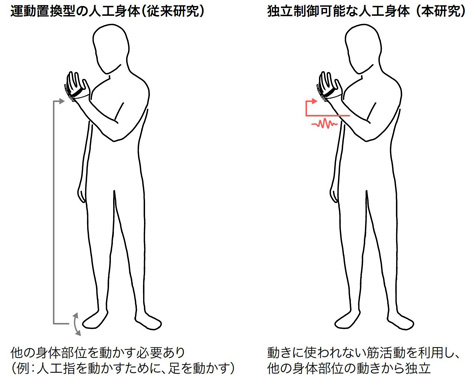
脳は身体の変化にとても柔軟に対応できるが、持たない身体部位を人工的に付加した場合、付け加えられた身体を自分の身体として感じ、自由自在に動かすことができるのか――こうした可能性を検証する1つの試みとして近年、ロボットアームや指型の人工身体を自らの身体に装着し、それを足など他の身体部位の動きで動かす研究がなされている。
しかし、従来の試みでは、既存の身体部位の機能や動きを人工身体のそれへと置き換えているに過ぎず、自らの持つ身体部位の機能や運動性はそのままで、独立して制御できる新しい人工身体を獲得できるかは明らかになっていなかった。
今回、工学的に、既存の身体部位と独立して動かせる人工身体部位が実現できることがわかった。応用的な観点からは、高速なキータイピングや6本指での楽器の演奏など、豊かで便利な生活に貢献できる可能性がある。
さらに同様の技術の応用により、第3の腕や4本の脚の実現、さらにはしっぽや羽など人間が持っていない器官を身体化できるのかという問いにも挑戦できる可能性がある。また、新しい身体部位を身体化することで脳にどのような変化が起きるのか、脳がどこまで新しい身体を受け入れることができるのかといった問いにも挑戦できるとしている。