変形型月面ロボット「SORA-Q」(左)変形前 (右)変形後
タカラトミーは2022年3月15日、宇宙航空研究開発機構(JAXA)と共同開発した小型の変形型月面ロボット「Lunar Excursion Vehicle 2(LEV-2)」を用いて、月面でのデータを取得すると発表した。
LEV-2は、JAXAの小型月着陸実証機「SLIM(スリム)」に搭載される。愛称は「SORA-Q(ソラキュー)」。タカラトミーは、ispaceの月着陸機「HAKUTO-R」への搭載による月面輸送計画も既に発表しており、合計2回の月面探査を行うこととなった。
月面の低重力環境下における小型ロボットの探査技術実証を目的とする。月面に到達すること、SLIMから分離して月面に着陸すること、月面のレゴリス上を走行し、動作ログを取得して保存すること、着陸機周辺を撮影して画像を保存すること、撮影した画像データやステータス、走行ログをSLIMとは独立した通信系で地上に送信することの5つを実証ポイントとしている。
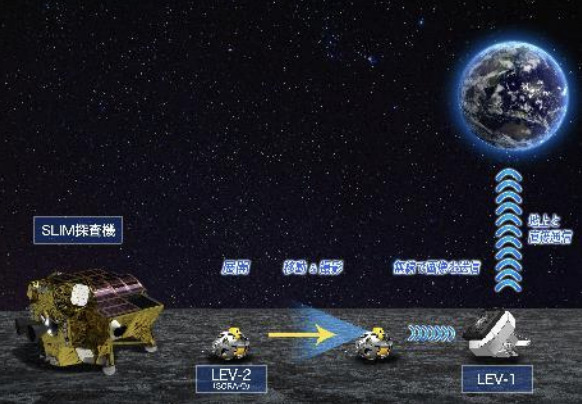
SORA-Qの実証イメージ
SORA-Qは、直径約80mm、質量約250gと小型のロボットだ。月面に着陸した後、球体が左右に拡張して変形し、外殻が車輪として回転することで月面を移動する仕組みとなっている。
開発には、変形ロボット玩具「トランスフォーマー」などで培った同社の玩具開発に関する知見を活用した。2016年からJAXAと筐体の共同研究を開始しており、2019年にソニーグループが、2021年に同志社大学が開発に加わっている。
「バタフライ走行」と「クロール走行」の2種の走行モードを備えており、転倒しても復帰できるほか、傾斜地も走行できる。頭部前方のカメラで周囲の状況を、後方のカメラでは自らの走行跡を撮影する。

Bluetoothを介して撮影したデータを小型探査ロボット「LEV-1」に送信し、LEV-1が地球へと送信する。送信するデータはSORA-Qが自己判断して選別する。月面到着から画像送信までのミッション実行時間は、約1〜2時間程度の見込みとなっている。