- 2022-4-22
- 化学・素材系, 技術ニュース
- AI, NEDO, VR, コロンビア大学, ナノマシン, 九州大学, 分子ロボット, 分子ロボットの群れ, 分子ロボット総合研究所, 北海道大学, 名古屋大学, 新エネルギー・産業技術総合開発機構, 研究, 関西大学
北海道大学、関西大学は2022年4月21日、九州大学、コロンビア大学、名古屋大学と共同で、ロボットの群れの形成、離散を遠隔で操作する分子機構を導入し、分子ロボットの「群れ」を世界に先駆けて開発したと発表した。開発した分子ロボットの群れは、世界で初めて、効率的に最大直径30マイクロメートルの物質を輸送した。
分子で構成され環境に応じて動く「分子ロボット」は、マイクロナノマシンとしての応用が、医療や環境保全の現場などで期待されているが、分子ロボットを構成する分子部品の設計に高度な知見が必要なことや、多くの時間を完成までの工程に要することから開発が容易ではなかった。
こうした背景から、北海道大学、関西大学、分子ロボット総合研究所は、NEDO(新エネルギー・産業技術総合開発機構)の「人と共に進化する次世代人工知能に関する技術開発事業」にて、人工知能(AI)とVRを活用した分子ロボット共創環境の研究開発に取り組んでいた。分子ロボットの群れは、この中で確立した環境を利用して開発。分子部品の設計から完成までの工程に多くの時間を要する課題を大幅に改善した。
また、世界で初めて、分子ロボットの群れの実働で、これまでできなかったタスクに成功している。マイクロスケールやナノスケールまで小型化されている分子ロボットだが、サイズが小さいため、これまで実効的なタスクの遂行には至っていなかった。研究では、群れロボット工学の考え方に基づき、群れとして分子ロボットを制御。これまで分子ロボット単体ではできなかったタスクを遂行した。
まず、化学的な手法で、モータータンパク質(駆動系)、DNA分子コンピュータ(制御系)、フォトクロミック色素(センサー系)を組み上げ、単体で直径25ナノメートル、全長5マイクロメートル(髪の毛の20分の1)程度のサイズの分子ロボットを開発。フォトクロミック色素には、群れの形成、解離を可視光や紫外光で遠隔操作するため、感光性分子のアゾベンゼンを用いている。
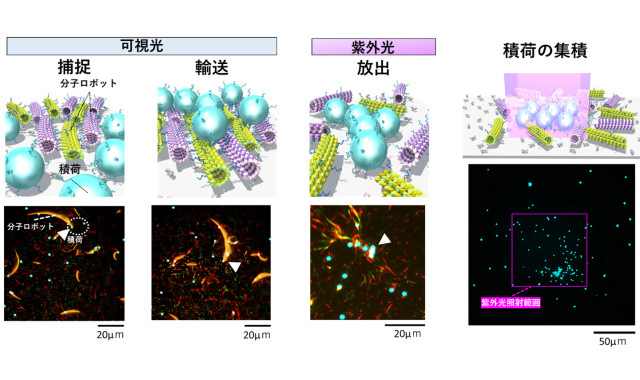
また、フォトクロミック色素を導入したDNAを、分子ロボットに輸送させるプラスチック製のマイクロビーズ(直径数マイクロメートル~数十マイクロメートル)の表面に修飾し、光照射による結合解離機構を持たせた。これにより、可視光照射下では分子ロボットにマイクロビーズを捕捉させ、紫外光照射下では放出させることができる。
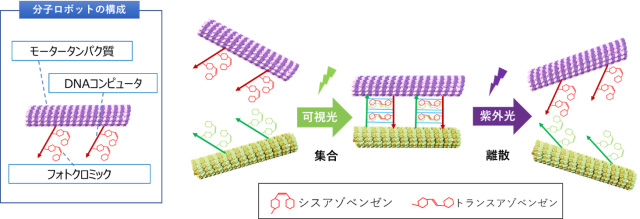
分子ロボットの構成と集合、離散の仕組み
実験では、分子ロボット単体と分子ロボットの群れ(今回は約100万体を使用)で、マイクロビーズの輸送をそれぞれ実施し、比較検証した。分子ロボット単体は、可視光(波長480ナノメートル)、紫外光(波長365ナノメートル)照射下で直径3マイクロメートル程度までのビーズしか輸送しかできなかった。しかし、同様の実験を分子ロボットの群れに実施した結果では、最大直径30マイクロメートルのビーズを輸送できた。
実験の結果、ロボットの群れは分子ロボット単体と比べ、積荷サイズが10倍ほど拡大されたことがわかった。さらに3マイクロメートルのサイズのビーズを対象に実験した結果、分子ロボット単体と比べ、群れによる輸送は5倍ほど効率(時間あたりの輸送距離と輸送量)が向上することもわかった。
また局所的に紫外光を照射することで、任意の場所にビーズを集めることにも成功。輸送の空間精度も、30マイクロメートル以下と極めて誤差が少ないことがわかった。群れの持つ利点により、分子ロボット単体ではなし得なかった大きなサイズの積荷を運搬できることに加え、輸送効率が大幅に向上した。
北海道大学、分子ロボット総合研究所、関西大学は今後も、分子ロボットの研究を進めていく。今回の分子ロボットの群れの研究成果は、将来的にはマイクロナノマシンとしての薬剤の運搬や選択など医療分野、汚染物質の回収など環境保全分野への応用が期待される。