- 2022-5-10
- ニュース, 制御・IT系, 技術ニュース
- SAC, Soft Actor-Critic, ニューラルネットワーク, ロボティクス, 制御システム, 東京大学, 深層強化学習法, 研究, 超音波モータ
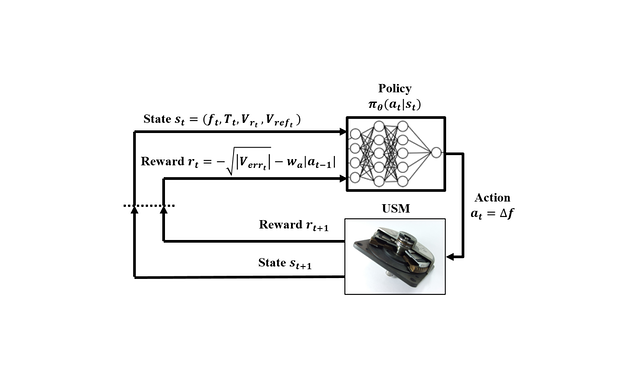
超音波モータ制御における深層強化学習のシステム構成
東京大学は2022年5月9日、深層強化学習法を活用した超音波モータの最適制御システムを開発したと発表した。
超音波モータは電磁モータと比較して重量当たりのトルクが大きく、高速応答性に優れている。加えて小型化にも適していることから、遠隔手術システムや遠隔救助ロボット制御などへの応用が期待されている。しかし超音波モータは、入力電圧信号に対する回転出力の関係が極端に非線形で、しかも過去の履歴に基づいて特性が変化するヒステリシスを有すること、さらに温度上昇によってパラメータが変化してしまうため、制御が難しいという課題があった。
今回の研究では深層強化学習法として、連続値制御のための手法Soft Actor-Critic(SAC)を用いて、超音波モータへの入力信号を出力するActorニューラルネットワークと、システム評価に用いるCriticニューラルネットワークを構築。Actorニューラルネットワークの入力パラメータを、駆動周波数、超音波モータの温度、回転速度、目標回転速度とし、駆動周波数の増減量を出力するシステムとした。
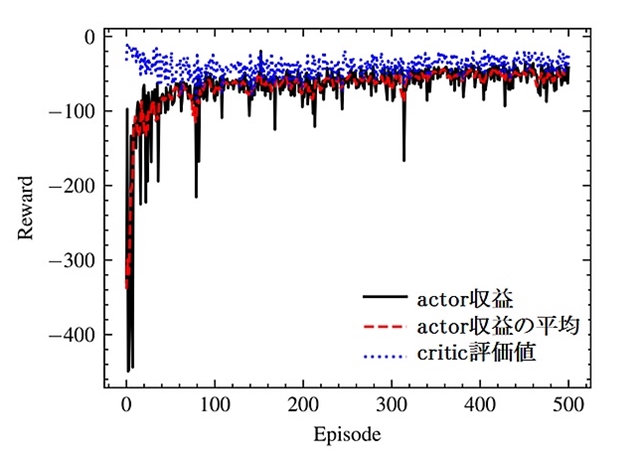
深層強化学習法の学習履歴
このシステムにより、目標回転速度を変化させながら制御し、実際の回転速度の関係などからニューラルネットワークの重み付けパラメータを学習。最終的に非常に柔軟な制御則を得ることができた。同システムで超音波モータを制御する際には、学習によって得られたパラメータを用いて駆動すればよく、温度変化に対応しながら最適な条件で高速駆動できるようになる。今回開発した制御方法は、回転速度制御の他にも、トルク制御や位置制御、コンプライアンス制御、効率最適化にも適用できるという。
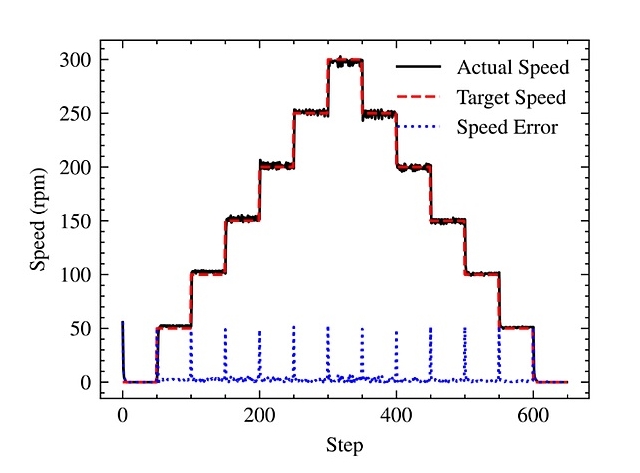
深層強化学習法による制御システムを用いた回転速度制御の結果
今回の研究成果は、遠隔手術システムや触覚提示デバイスなどのロボティクスの他にも、5Gや仮想現実などを応用したエンターテインメント領域や高齢者向けのリハビリシステムなどへの応用が期待されるという。