- 2023-2-10
- 制御・IT系, 機械系, 研究・技術紹介, 電気・電子系
- ADRAS-J, ADR(Active Debris removal), ELSA-d(エルサ・ディー), ELSA-M, EOL(End of Life), ISSA(In-Situ SSA), LEX(Life Extension), RPO(ランデブー・近接運用), スペースデブリ(宇宙ごみ), ドッキングプレート, メガコンステレーション, 商業デブリ除去実証(CRD2), 地球低軌道(LEO:Low Earth Orbit), 宇宙状況把握(Space Situational Awareness), 静止軌道(GEO:Geostationary Orbit)

株式会社アストロスケール エンジニアリング・ディレクター 小林 裕亮氏
1957年に世界初の人工衛星「スプートニク1号」が打ち上げられて以来、現在までに世界で約13,000機以上の人工衛星が打ち上げられ、世界中をつなぐ通信インフラなど様々な用途に使われてきました。しかし、運用が終わり寿命を迎えた人工衛星や、その人工衛星を宇宙へと運んできたロケットの上段の大半は、そのまま軌道上に残り、スペースデブリ(宇宙ごみ)となっています。加えて、近年SpaceXが運営するスターリンクなど、低軌道を使った衛星コンステレーションサービスのために、数千機以上の人工衛星を打ち上げるようになり、宇宙空間は以前よりも「手狭」になってきているとも言われています。
今回は、人工衛星などの宇宙機の安全航行の確保を目指し、次世代へ持続可能な軌道を継承するため、全軌道における軌道上サービス開発に取り組んでいる、株式会社アストロスケールのエンジニアリング・ディレクター 小林 裕亮氏に、お話を伺いました。
<プロフィール>
株式会社アストロスケール エンジニアリング・ディレクター 小林 裕亮氏
東京大学で航空宇宙工学の学士号を取得後、マサチューセッツ工科大学で航空宇宙工学の修士号を取得。日本電気株式会社(NEC)の宇宙事業部門にて人工衛星のライフサイクル全体の実践に携わり、2018年に株式会社アストロスケールに入社。ELSA-dプロジェクトのシステムズ・エンジニアリングリードを務め、2021年よりエンジニアリング・ディレクターに就任し、日本のエンジニアリング部門の組織計画・運営と、併走するプロジェクトでの開発の実践を統括する。
――よろしくお願いします。御社はスペースデブリの除去に取り組まれているとのことですが、具体的にどのような事業を手掛けているのでしょうか。
[小林氏]弊社は日本に本社を置き、イギリス、アメリカ、イスラエル、シンガポールの5カ国6拠点でグローバルに事業展開を行っています。創業当時からの目標であるスペースデブリの除去をはじめ、宇宙・軌道上環境の継続的な活用のための環境維持をミッションに掲げています。
そのための軌道上サービスとして、すでに軌道上にある運用を停止した人工衛星やロケットの上段などのデブリの除去を行うADR(Active Debris removal)。今後打ち上げる人工衛星向けに、運用終了時のデブリ化防止のための除去やデブリ発生を緩和するEOL(End of Life)。軌道上で宇宙環境や宇宙機の点検・観測を行うISSA(In-Situ SSA)。ごみをなるべく作らないように人工衛星の寿命延長を行うLEX(Life Extension)の4つの柱を建て、サービスラインナップとして準備をしています。
軌道上にある既存デブリの除去を行うADR
[小林氏]ADRは、軌道上の大型デブリをロボットアームで除去するサービスです。スペースデブリは、研究機関によって、このまま放置すると他の物体に衝突して環境悪化を引き起こす可能性についてのランキング付けがなされており、危険度の高いものから優先的に除去していくことを考えています。サービスを利用いただくお客様としては、基本的に国家機関や関係省庁、日本でいえばJAXA(宇宙航空研究開発機構)、欧州ではESA(欧州宇宙機関)などを想定しています。
デブリの除去は2013年の創業以来取り組んできた事業領域であり、スペースデブリの捕獲と除去に必要なコア技術を実証する民間世界初のミッションとして、2021年3月22日にスペースデブリ除去技術実証衛星「ELSA-d(エルサ・ディー)」を打ち上げました。このELSA-dは、後にご説明するEOLの一環として実施したプロジェクトとなります。
デブリ除去に必要な主要技術を実証するにあたり、まずはRPO(ランデブー・近接運用)と捕獲の技術の一部を実証することに特化しました。ELSA-dは、捕獲衛星(サービサー)と模擬デブリ衛星(クライアント)で構成されていて、サービサーにはRPO技術のシステムと磁力による捕獲機構が、クライアントには磁性体のドッキングプレートが搭載され、宇宙空間におけるデブリの探索・接近・ドッキングの実証を実施しました。
その結果、宇宙空間で永久磁石を使ってドッキングするという世界初となる機構の実証や、対象との距離30メートルの位置を維持する技術の実証に成功しました。その後スラスターに異常が出たため、安全のために距離を取って退避させました。退避先から実証の再チャレンジを試みた結果、当初の軌道上実証スコープに入っていなかった、遠方からの監視と接近、絶対航法からセンサーを使った相対航法への切替えなど、高難度の誘導接近の技術についても、大きな知見を得ることができました。
――デブリ除去サービスの運用方法は、サービサーを打ち上げてデブリを捕獲して、そのまま高度を下げて地球に向かって落とす、つまり大気圏突入させて燃やしてしまうということになるのでしょうか?
[小林氏]その通りです。ただ、サービスとして提供するには、コストを抑えた手段まで考える必要があります。つまり、サービサー1機で1個のデブリを落とすのではなく、複数のデブリ処理が可能なシステムが必要となります。これはADRサービスに限ったことではなく、例えばEOLサービスでは1度のミッションで複数のクライアント衛星を捕獲除去する「ELSA-M」というソリューションの開発を進めています。
今後のデブリ発生を抑制・緩和するEOL
[小林氏]EOLは、これから宇宙機を打ち上げる民間企業に向けたBtoBのサービスで、主にメガコンステレーションと呼ばれる、宇宙空間に数百から1万機の人工衛星をネットワークのように配置して通信インフラを実現する、SpaceXのスターリンクのようなサービスを提供するお客様向けのものです。このサービスを実現するための要素として、お客様が打ち上げる宇宙機にあらかじめ装着する、ドッキングプレートと呼ぶハードウェアを開発しています。

第2世代のドッキングプレート。取り付けは、顧客の宇宙機にあわせてカスタマイズ可能で、画像認識により追尾しやすいなどの工夫がなされている。画像提供:アストロスケール
[小林氏]衛星コンステレーションのサービスプロバイダーなどが、磁石でくっつき、識別マーカや反射機で認識しやすく、画像認識技術などを備えたドッキングプレートをあらかじめ宇宙機に装着して打ち上げることで、運用終了時や万一の故障時でも除去しやすくなり、運用コストを抑えることができます。
衛星コンステレーションは、人工衛星を網目のように張っておかないと成り立ちません。そのため、人工衛星の故障によってネットワークに穴が開いてしまったら、速やかに故障した人工衛星を除去して正常に作動する人工衛星とリプレースする必要があり、それが容易に行える技術とサービスを持つことが、弊社の強みになると考えています。
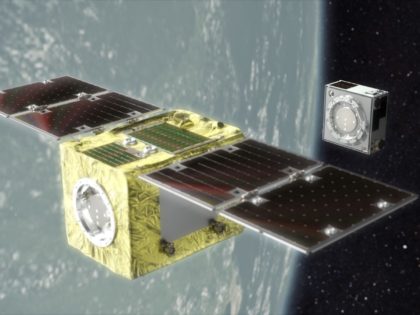
デブリ除去にかかる一連の技術を実証する民間世界初のミッションとして打ち上げられた「ELSA-d」は、EOLの実現に必要な多くのコア技術や運用機能の実現性を証明した。画像提供:アストロスケール
軌道上で物体を点検・観測するISSA
[小林氏]ISSAは、故障機や物体の観測・点検を目的とするサービスです。SSAは宇宙状況把握(Space Situational Awareness)を指し、宇宙での活動や宇宙環境(宇宙天気を含む)の特徴を把握するものです。
一般的に、軌道上の物体は地上にあるレーダーや可視光による観測を行いトラッキングされていますが、やはり精度の限界から人工衛星は1個の点にしか見えないので、具体的にどういう状態にあるかまでは分からないのです。そのため、実際に近くに行って直接観測したいというニーズがあると考え、お客様へヒアリングをしながらサービス内容を詰めているところです。
スペースデブリの増加を防ぐための寿命延長を行うLEX
[小林氏]Life Extension (LEX)は、軌道上で運用される人工衛星の寿命延長サービスで、静止衛星をサービス対象に考えています。静止軌道にある人工衛星は開発規模が大きく、1機を配備するためのコストは数百億円とも言われています。そのため機能の一部が故障したとしても、簡単に人工衛星自体を交換することができません。また、人工衛星の破棄はスペースデブリの増加につながりますので、運用中の人工衛星を整備・修理して、継続的に活用することの価値が高まりつつあります。
例えば、メインの通信機構、アンテナや送受信機が生きているのに姿勢や軌道制御を行うスラスターが故障してしまったというケースでは、その制御を行う機能だけ補完します。クライアントの人工衛星よりも小さく低コストなものをドッキングして、損傷した機能を補うというサービスで、数年以内の実用化を目指して技術開発を進めています。
――故障した人工衛星の機能を補完するサービスということですが、過去にはNASAのスペースシャトルが故障したハッブル宇宙望遠鏡にアクセスして、宇宙飛行士が修理したことがありました。そうした有人での修理ではなく、無人機のドッキングによる機能補完ということでしょうか?
[小林氏]例えば、国際宇宙ステーション(ISS)やハッブル宇宙望遠鏡などは、高度2000キロまでの地球低軌道(LEO:Low Earth Orbit)を周回しています。これらはLEOでも比較的低いところを周回していて、ISSは高度400キロ、ハッブル宇宙望遠鏡は高度500キロにいます。例外もありますが、基本的には有人で修理するものは、LEOにあり、かつハッブルのような非常に高額な国家プロジェクトが対象になります。それに対して静止衛星がいる静止軌道(GEO:Geostationary Orbit)は、高度3万6000キロとLEOより桁違いに遠いので、修理のためだけに人を送るのは、コストパフォーマンスの面で成立しないでしょう。
(注:GEOは赤道上の高度3万5786キロの円軌道で、軌道周期が地球の自転と同期するため、静止軌道にある衛星は、地上からは上空に静止しているように見える)
また、商用の静止衛星は10数年前に打ち上げられたものが多く、もともと使い捨てを前提とした設計がなされていて、容易に部品を交換できるような仕組みになっていません。そのため、具体的には静止衛星に備わっているロケット上段と接続するためのリングを我々のサービス衛星で掴んで剛結合し、スラスターとしての機能を補完することを考えています。静止衛星は、その名の通り見かけ上静止していることに価値があるのですが、地球の重力や太陽や月の引力の影響を受けて、徐々に軌道がずれていきます。また、回転してあらぬ方向を向いてしまうこともあるので、定期的にスラスターによる軌道制御が必要で、これを維持することにニーズがあると見ています。
コアとなる技術はランデブー・近接オペレーション
[小林氏]ここまで事業の4つの柱である、ADR/EOL/ISSA/LEXについてお話ししましたが、いずれもコアとなる技術はRPO(ランデブー・近接オペレーション)と呼んでいる、軌道上にある物体に近づく(ランデブー)、さらに近づいて何かをする(近接オペレーション)技術です。このRPOがすべてのサービスで使われる基礎技術となります。ELSA-dをはじめとする初期の技術実証で得たRPOの技術と知見をベースに、ドッキングの方法や軌道上の位置などのバリエーションをできるだけ限定することで、開発を効率化することを考えています。
――ご説明いただいた4つの柱について、今後どのような事業展開を計画されていますか?
[小林氏]まずADRについては、JAXAの「商業デブリ除去実証(CRD2)」というプログラムのパートナーに、弊社の「ADRAS-J」衛星が選定されました。CRD2は2段階に分かれたプログラムになっており、フェーズ1は、対象の物体の直前まで接近して写真撮影を行い、データを取得するところまで進めます。次のフェーズ2は、実際にその物体に近づき、捕獲して除去するところまで行う予定です。アストロスケールはフェーズ1の契約相手方に選定されており、フェーズ2に関しては、フロントローディング技術検討の1社に選定されています。現在、ELSA-dに続くプロジェクトとなる「ADRAS-J」衛星の打ち上げに向けて、準備を進めているところです。
EOLについては、アストロスケール英国が中心となり、ESA(欧州宇宙機関)とOneWebという衛星通信企業と共同プロジェクトを進めています。
人工衛星の寿命を延長するLEXでは、商用静止衛星プロバイダの事業者と打ち合わせをしている段階で、低軌道LEOにおいてもサービス開発につながるアイデアが活発に出てきています。その中から弊社のミッションと整合するものを、取捨選択しながら検討を進めているところです。ADRなど既に問題となっているデブリ除去についての課題意識は高くなってきていると思いますが、LEXの必要性もここ数年で広く認知されてきたと感じています。
そのひとつのきっかけが、アメリカ連邦通信委員会(FCC)の動きです。FCCはLEOを周回する人工衛星について、これまで「運用終了後25年以内に廃棄軌道へ移すこと」と規定していましたが、運用終了後5年以内に短縮する「5年ルール」を発表し、厳密に運用することでスペースデブリとして存在する期間を大幅に減らそうとしています。こうした背景もあって、人工衛星も宇宙空間のサステナビリティという視点から、具体的な改善アクションが活発に議論されるようになりました。

――スペースデブリの増加防止に対して、世界中で取り組みが本格化しているのですね。「技術実証機ELSA-d」は民間宇宙開発のパイオニアだと思いますが、このプロジェクトをご経験されての所感をいただけますか?
[小林氏]ELSA-dは自社のプロジェクトでしたから、何をしなければいけないのかすべて自分達で定めてコントロールしていくところが難しかったですね。目標を小さくすれば達成は容易ですが、得られるものは小さい。かといって大きすぎる目標では失敗してしまうので、エンジニアのリーダーの一人として、そのバランスの調整に苦労しました。
ELSA-dのプロジェクトを始めた頃は弊社のエンジニア数も20人に満たなかったのですが、ELSA-dと共にエンジニア組織も成長してきました。弊社には元は大企業の出身というエンジニアも多く在籍していますが、宇宙ベンチャーは意思決定が早く、圧倒的なスピード感があってとても刺激的でしたし、みんな覚悟と情熱を持ってプロジェクトに参加していました。その結果、多少のトラブルがあってもみんなで乗り越えて、大きな成果を出せたのだと思います。
――ありがとうございます。では、最後に御社や宇宙開発の領域で求められるエンジニア像について、お話をいただけますか?
[小林氏]弊社のエンジニアチームに参加いただくのには、決して宇宙分野の出身である必要はありません。実際に様々な業界から来ている方が多いのですが、やはり自分の得意な分野を持ち、この領域では誰にも負けないという技術を一つは持っていることが大事だと考えています。その上で、そこに拘り過ぎず、周囲から新たな技術や知見を柔軟に吸収できる素養も重要です。そうした考え方や姿勢を持った人であれば、ぜひ一緒に軌道上サービスを作り上げていきたいと考えています。
道なき道を作るという開拓者精神
[小林氏]宇宙開発は比較的新しい領域のため、半導体や自動車のような歴史があって成熟した産業とは違い、このマニュアルに沿ってやれば製品がつくれる、というものがありません。そのため、常に新しいことにチャレンジする姿勢が求められます。また、アメリカの宇宙開発の黎明期にできた様々なルールがあるのですが、中には20年、30年経った今、なぜこのようなルールがあるのか分からなくなっているものもあります。そうしたルールはもちろん真摯に受け止めて対応するのですが、全て遵守すればいいかというと、それでは事業開発が進まないこともあります。そうした時に、なぜそうなっているのかを柔軟に考え、自分達のやり方、会社としてのリスクの取り方を考えながら進められる人、そういったことまで含めて興味を持って取り組める人が求められています。自動車も半導体も、黎明期の頃は同じだったのかもしれません。道なき道を作ることに面白さを感じられる人、開拓者としての心構えを持てる人には、ぜひ、宇宙開発の領域にチャレンジしてほしいです。