- 2023-6-16
- 技術ニュース, 機械系
- アラバマ大学, ハチドリ規範型羽ばたき翼型飛行ロボット, ロボハチドリ信州, 九州大学, 低大気密度, 信州大学, 前橋工科大学, 東北大学, 東北大学大学院工学研究科, 火星大気風洞の減圧チャンバー, 研究, 羽ばたき翼型飛行ロボット, 高高度飛行
東北大学大学院工学研究科の野々村拓准教授らの研究グループは2023年6月15日、信州大学、九州大学、前橋工科大学、米国アラバマ大学ハンツビル校と共同で、羽ばたき翼型飛行ロボットにおける世界初のリフトオフ実験に、低大気密度を模擬した環境下で成功したことを発表した。羽ばたき翼特有の空気力学的メカニズムの活用による低密度/高高度環境下での飛行の実現可能性を示している。
昆虫・鳥・コウモリなどの飛翔生物は、翼の羽ばたき運動や胴体や尾翼の動きを利用して優れた飛行を行っている。なかでも、翼面上に形成される前縁渦が、地上の飛翔生物の自重を支える空気力発生の共通メカニズムとして理解されている。地上より空気密度の低くなる、高度数千m以上の標高の高い場所に生息する飛翔生物は、飛行の際に地上より大きな空気力が自重を支えるために必要になるが、この揚力の補償メカニズムを含む高高度での生物飛翔のメカニズムの詳細は明らかになっていない。
これまでに高高度での飛行は、マルハナバチやオオカバマダラで確認されており、マルハナバチは翼を大きな振幅で羽ばたきながら飛翔し、オオカバマダラは体の姿勢と飛行速度を調整して飛んでいることが観察されている。
生物を規範としたさまざまなタイプの羽ばたき翼型飛行ロボットが開発されてきたが、空気密度の低下に伴う揚力低下が起こる過酷な環境下の高高度に向けた開発はされていなかった。
また、低大気密度環境下では、羽ばたく翼の変形が地上付近とは本質的に異なり、翼の動きの事前の予測が困難で、目標の機体重量を維持する揚力を生成する翼の大きさや動作を設計し、開発することが不可能だった。さらに、空気中(海面)や水中と比べて流体の密度が低い状態での実験は難しく、密度の低い中で飛行する生物とロボットの動きを精度良く観察することができなかった。
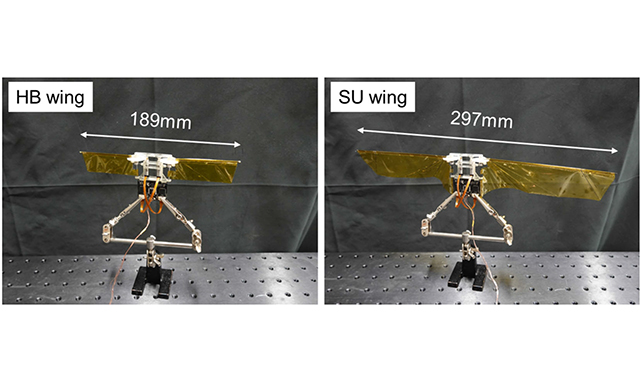
そこで研究グループは、ハチドリを規範とした無尾翼羽ばたき翼型飛行ロボット「ロボハチドリ信州」を開発。翼の動きと空気力の同時計測と生物飛行のスケーリング関係との比較を、空気密度0.360kg/m3(9000m)から1.184kg/m3(海面)の範囲で実施した。
高高度飛行を模擬した低密度環境は、東北大学流体科学研究所所有の火星大気風洞の減圧チャンバーを用いて構築。翼が発生する空気力と翼面形状を同時に計測したところ、単純に翼を早く動かすのではなく、翼のサイズと羽ばたき周波数を上手く調整することで、ロボットの翼が十分に大きな羽ばたき振幅と飛翔生物の翼の回転角変化に近い受動的な回転角変化を実現できた。
この結果、大気密度が地上と比べて約3分の1の低大気密度環境下でも、地上での空気力発生機構による大きな揚力を発生させ、羽ばたき翼型飛行ロボットの世界初のリフトオフ実験に成功した。
今回の結果は、生物の高高度飛行メカニズムの理解と、さらに低密度となる火星大気環境などでの羽ばたき翼型飛行ロボットの飛行につながる研究成果といえる。
関連情報
標高9000m相当の低大気密度を模擬した環境下で羽… | プレスリリース・研究成果 | 東北大学 -TOHOKU UNIVERSITY-