- 2023-8-10
- 技術ニュース, 機械系
- IC-SLD, インピーダンスゲイン, インピーダンス制御, パナソニックHD, パナソニックホールディングス, ベイズ最適化, ロボット, 制御パラメータ, 協働, 教示, 研究
パナソニックホールディングスは2023年8月8日、ロボット制御時に、環境(ドアやテーブルなど)との接触を含むロボットへの動作教示を効率化する技術を発表した。教示した動作を正しく完遂する「パフォーマンス」と、接触時の「安全性」を両立する制御パラメータを効率的に学習する。
ロボットの動作をプログラムする手法として、人がダイレクトにロボットの動きを教示するダイレクトティーチングがあるが、モノとの接触がある環境や、人や他のロボットと協働、分業する環境下では不測の接触リスクに対応する必要があり、多様なタスクへの展開が難しいという課題があった。
一方、仮想的なバネ系を模倣することで、ロボットにバネのような柔軟性を与えるインピーダンス制御は、適切なバネ系のパラメータ(インピーダンスゲイン)を設定できれば、教示した動作を正確にこなしながら接触リスクを低減できる。
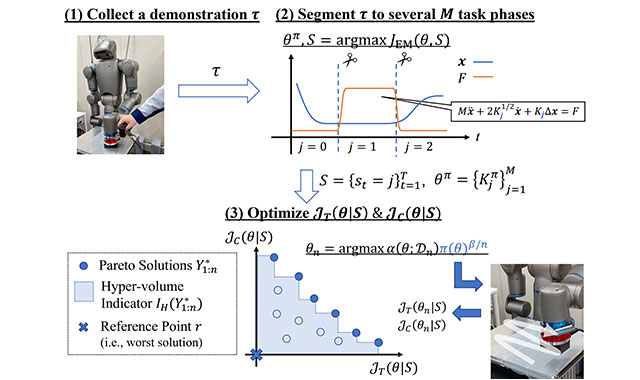
しかし、インピーダンス制御においては、安全性と動作の正確さは一般的にトレードオフの関係で、同時に最適化するインピーダンスゲインの設定が難しい。また、タスクの達成には、連続する複数の動作を正確にこなす必要があるが、最適なインピーダンスゲインが動作毎に異なっている。そこで、二段階の手法を考案し、パラメータを最適化しやすいように教示した一連の動作を分節化してから、多目的ベイズを最適化し、各分節の最適なインピーダンスゲインを求めた。
前段として今回開発した分節化手法 IC-SLD(Impedance Control-aware Switching Linear Dynamics)では、インピーダンス制御が想定するバネ系の運動方程式の複数の組合せにより、教示した一連の動作が生成されたと仮定し、方程式内の未知のインピーダンスゲインと方程式の切り替え時刻を推論する問題として定義した。その結果、IC-SLDは、従来法(GMM、SLDなど)と比べ、最適化に適した分節化ができた。
後段では、事前知識を活用したベイズ最適化でインピーダンスゲインを探索した。IC-SLDは、インピーダンスゲインの推定値も出力するため、解候補として活用し、最適化を効率化した。その結果、今回開発した手法は、シミュレーションと実機評価で、インピーダンスゲインの学習を従来法に比べて短時間でできることを示した。
同社は、今回の開発は、人とロボットが協働する環境でのロボット活用を加速する技術であるとしている。
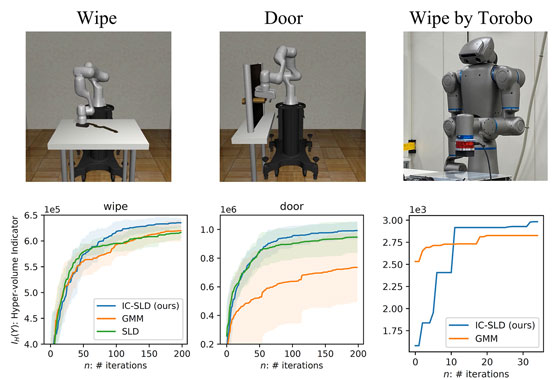
開発した手法のシミュレーションおよび実機でのインピーダンスゲインの学習結果