- 2023-9-28
- 技術ニュース, 機械系, 海外ニュース
- 3Dプリント, Cyborg and Bionic Systems, コインブラ大学, ソフトアクチュエーター, ソフトロボット, ソフトロボットハンド, ロボット, 外骨格, 学術, 有限要素解析(FEA), 空気圧
柔らかい素材をベースにしたロボットは、人間や動物の外見や動き、能力の再現に優れている。多種多様なソフトロボットが存在するが、高価な部品や複雑な製造工程が理由で、その多くは大規模生産に至らないのが現状だ。
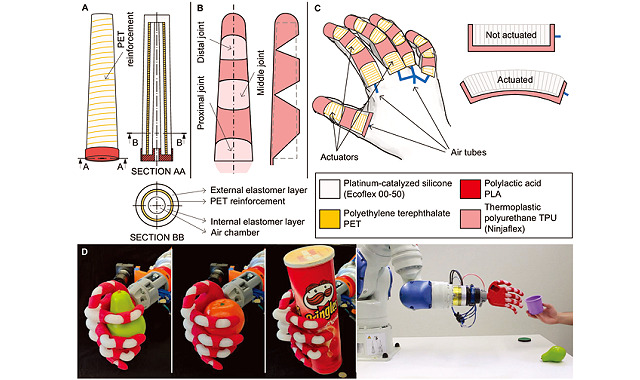
ポルトガルのコインブラ大学の研究チームは、安価で製造が容易な、空気圧で作動する人間の手によく似たロボットハンドを開発した。ソフトアクチュエーターと外骨格を組み合わせた構造で、どちらもスケーラブルな技術で製造できる。研究成果は『Cyborg and Bionic Systems』誌に2023年8月8日付で公開されている。
人間の体は、筋肉などの柔らかい部分と固い骨格でできている。今回開発したソフトロボットハンドは、人間の手の外観と機能を再現するために、指の曲げやすさを担保する外骨格と、それぞれの指に対応する5つのアクチュエーターで構成されている。
研究チームは物理的にロボットハンドを作製する前に、有限要素解析(FEA)を活用することで設計をバーチャルに最適化し、プロトタイプ作製にかかる時間とコストを削減した。有限要素解析の結果をもとに作製したソフトロボットハンドは、ソフトアクチュエーターは型を使って成形し、外骨格は3Dプリントで製作した。指の曲げ角度は、ON-OFFコントローラーにより指の空気圧を変化させて制御している。こうして作製したロボットハンドの性能を評価するために把持試験をしたところ、さまざまな形状、重さ、大きさの物体をつかむことに成功した。
研究チームは、この開発メソッドを利用すれば、設計や製作で試行錯誤するプロセスが回避でき、ソフトロボットハンドは低コスト化されて、より多くの人に利用されるようになるだろうと述べている。