- 2024-2-28
- ニュース, 制御・IT系, 技術ニュース
- AI(人工知能), OIST, グリッド世界, ロボット, 予知検出, 幾何学, 沖縄科学技術大学院大学, 状態複合体, 研究, 自動運転, 自律走行車, 衝突予知, 西安交通リバプール大学
沖縄科学技術大学院大学(OIST)は2024年2月27日、同大学および西安交通リバプール大学の共同研究チームが、幾何学的手法によりロボットや自律走行車の衝突を予め検知できることを見いだしたと発表した。
同研究チームは、グリッド世界においてエージェントとオブジェクトの配置を指定し、エージェントのアクションによって起こり得る全ての状態を考慮した。グリッド世界とは、正方形のセルを格子状に並べたものだ。冒頭の画像や末尾の動画のように、単一のエージェント(コアラ)やオブジェクト(ビーチボール)が1つのセルを占有する。
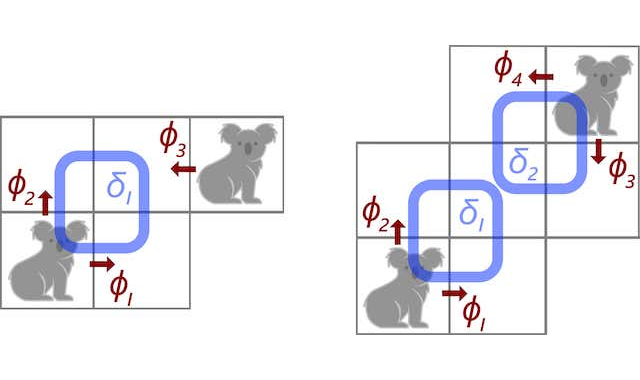
今回の研究では、移動(エージェントが隣の空のセルに移動する)と押し/引き(エージェントがオブジェクトをまっすぐに押したり引いたりする)の2つのアクションを許容した。これらのアクションを十分に繰り返すことで、状態複合体を作ることが可能となる。状態複合体とは、システムの全ての可能な構成を単一の幾何学的オブジェクトとして表現するものだ。状態複合体を形成することで、幾何学や位相幾何学、組合せ論といった数学的なツールを用いた研究が可能となる。
今回の研究では、手計算を伴った数学と今回の研究に向けて開発したコンピュータープログラムを組み合わせて、状態複合体の形成および分析を行った。
2つのエージェントが接近しすぎると、衝突の可能性が生じる。これは幾何学的な欠陥を示唆しており、グリッド世界ではこの現象が生じるたびに衝突しうることが判明した。
また、チェスにおいて、ナイトの移動やビショップの2段階の移動によって2つのエージェントが分離するとき、これらの幾何学的欠陥が状態複合体で生じることが明らかになった。
これらの発見により、衝突を回避するように訓練したAI(人工知能)システムにおいて、幾何学的欠陥を見いだすことが可能となる。
生活支援ロボットや災害地域探索ロボット、宅配用の自動運転車など、ロボットと人間が相互に関わる現場などにおける衝突の予知検出への応用が期待される。