こんにちは。片山均(かたやま ひとし)です。愛媛県八幡浜市にある三瀬医院で院長を務めながら、お金をかけずに作れるロボット製作についての研究をライフワークとしています。
これまでロボットの動力として、100円ショップの毛玉取り器やミニ電車を使ってきましたが、今回は新しい動力を手に入れました。ミニモーターカーです。
電池2本で動くミニカー。100円ショップのダイソーでは「ポケットカー」という名前で販売されています。
今回はこれを使って、四輪駆動(?)の6脚歩行ロボを作ってみました。もちろんタミヤのミニ四駆でも動きますよ。


ポケットカーで動く四輪駆動6脚歩行ロボの製作過程
まずは材料のご紹介を。

- ダイソーのポケットカー スピードスター(タミヤのミニ四駆でも可) 1台

組み立ては簡単だけど、窓のシールを貼るのがすごく難しい
- 竹の箸 10本
- ロリポップスティック 1本
- 木製スティック 42本
- ストロー 1本
- タイルマット 1枚
- 画鋲 12個
- 脚の長い画鋲 18個
それでは製作過程をご覧ください。

いつものざっとした設計図です。
竹の箸、木製スティック、ストローをグルーガンで接着して、ポケットカーを載せる胴体を作ります。
ピンバイスを使い、木製スティックに画鋲で留めるため直径1mmの穴を開けます。

ピンバイスはダイソーの手芸用ハンドドリル(径1.0mm)でも代用できます。

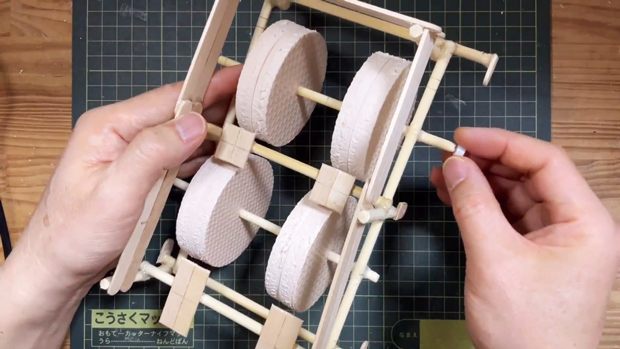
本体完成。
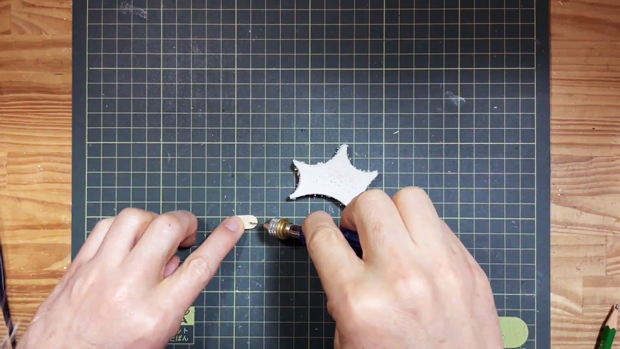
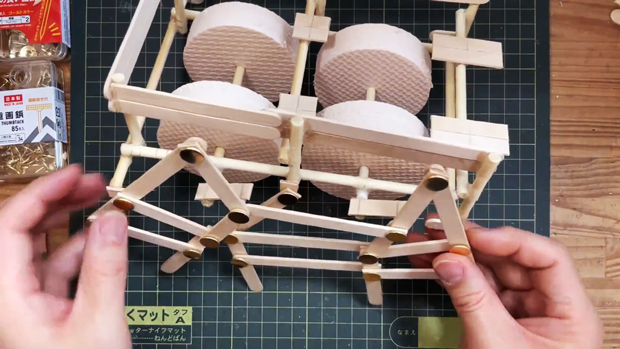
コンパスカッターでタイルマットを円形に切り出し、2枚ずつ貼り合わせたものを4組作ります。

円形のタイルマットに竹の箸を通して、胴体に取り付けます。
軸が左右にずれないように、左右から軸受けを挟むように短いストローを軸にはめて接着します。
クランク用の木製スティックにロリポップスティックを接着します。

先ほど作ったものを軸に接着してクランクを作ります。
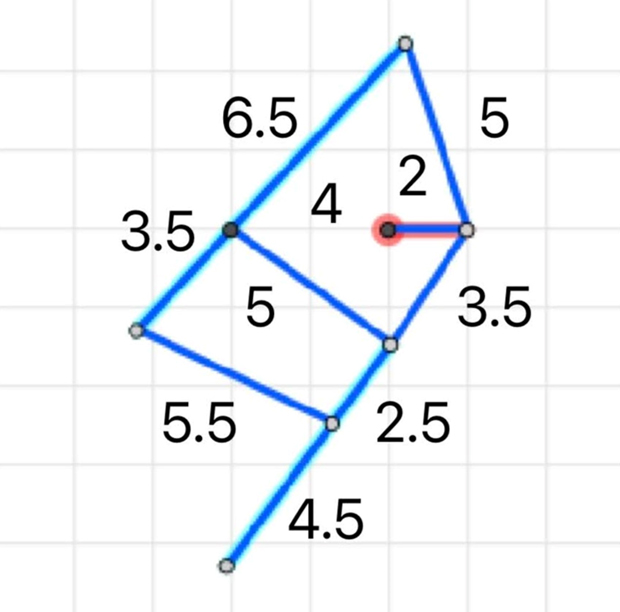

使用した8パーリンク機構はこちらです。

木製スティックを画鋲や足の長い画鋲でつないで、グルーガンで留めていきます。木製スティックが3、4本重なる箇所は、スティックをカッターで削って薄くしました。
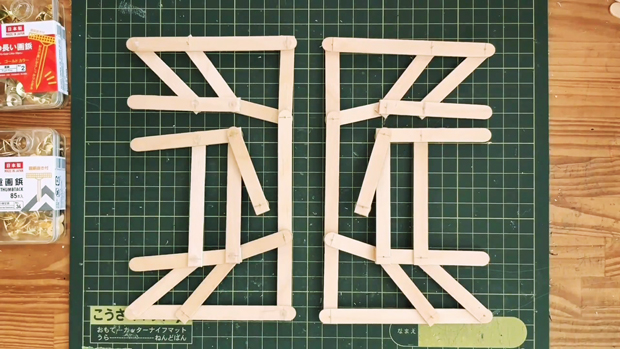
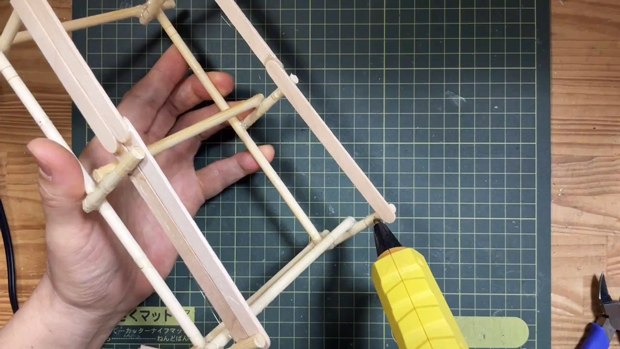
6本分の脚が完成。
足の長い画鋲で胴体に脚を留めていきます。


完成。ポケットカーで動く四輪駆動6脚歩行ロボ、誕生です。
最後の最後で大きなミスを犯していました

今回採用した歩行のためのリンク機構は、以前ネットで見つけたリンク機構シミュレーターを使って、毛玉取り器ロボット用に作った8パーリンク機構と平行リンク機構を組み合わせて作りました。
また、重量を支えたり、バランスと取ったりする目的で、平行リンクを使って中央に2本の脚を加えています。
これまでは、リンク機構の木製スティックを留めるために、画鋲のほかに竹串も使っていたため、木製スティックに2mm以上の穴を開ける必要がありましたが、すべて画鋲で留める設計に変更したところ、作業の手間が大幅に減りました。それだけでなく、ロボット本体もスリムになりました。

なお、リンク機構を組み立てるときに前後の脚が干渉しないように、木製スティックの重ね順を決めるところが苦労したポイント。実際に作ってみたいという方は注意しましょう。

実は約1年前にチェビシェフリンク機構を使った8脚ロボでミニ四駆を歩かせています。しかし脚が動くというよりも、固定された脚が4脚ずつ交互に前に出るため、あまり生き物が歩いているという感じはしませんでした。
それに比べると、今回のロボットは生き物感が増したと思います。今後はさらに改良を加えて、小動物的に歩くロボットを作ってみたいと思います。
なお今回一番の後悔は、ポケットカーを後ろ向きに載せなければ動かなかったところ……。これ、完成直前まで気付きませんでした。次は、きちんと車を前向きに載せて動くようにしたいですね。
第27回の研究発表は以上です。次回もお楽しみに!
企画・制作:片山均
取材・文:三浦一紀
(fabcrossより転載)