- 2017-6-13
- ニュース, 制御・IT系, 技術ニュース, 機械系
- ImPACT, タフ・ロボティクス・チャレンジ, ロボット, 東北大学, 空気浮上型能動スコープカメラ

空気浮上型能動スコープカメラ
東北大学は2017年6月12日、空気噴射によって瓦礫踏破能力を飛躍的に向上させた索状ロボット「空気浮上型能動スコープカメラ」を開発したと発表した。研究は同大学の田所諭教授らと国際レスキューシステム研究機構などのグループにより、内閣府の革新的研究開発推進プログラム(ImPACT)のタフ・ロボティクス・チャレンジの一環で行われた。
田所教授らの研究グループは、阪神淡路大震災を契機にレスキューロボットの研究を推進。開発した索状(ヘビ型)ロボット「能動スコープカメラ」は、すでに建設現場倒壊事故や福島第一原発1号機の瓦礫内調査でも使用され、災害現場調査での実績をあげてきている。しかしこれまでは、高い障害物や瓦礫を乗り越えることが難しく、捜索範囲を拡大する上での課題となっていた。また、散乱した瓦礫の中で被災者を発見し、位置を特定するには広い視野も必要となる。
今回開発した能動スコープカメラは、太さ直径約50mm、全長約8m、重さ約3kgの柔軟な索状ロボット。従来から装備している全身を覆う繊毛振動駆動アクチュエーターと、今回新たに搭載した先端部の空気噴射浮上機構からなり、先端にカメラを搭載している。
空気噴射浮上機構は、噴射方向を制御する能動ノズルにより、浮上、推進、方向制御が可能だ。「段差乗り越え機能」は、後ろ向きに空気を噴射することで、鉛直下向きと後ろ向きの力を生じさせ、先端が段差に乗り上がるとともに後続部分を引っ張り上げて、段差踏破能力の向上に寄与する。「方向制御機能」は、噴射の方向を左右に切り替えて先端の方向を大きく変化させる。また、先端が浮上して方向を切り替えることで周囲を見渡すことができる「高い視点からの見渡し機能」も備える。
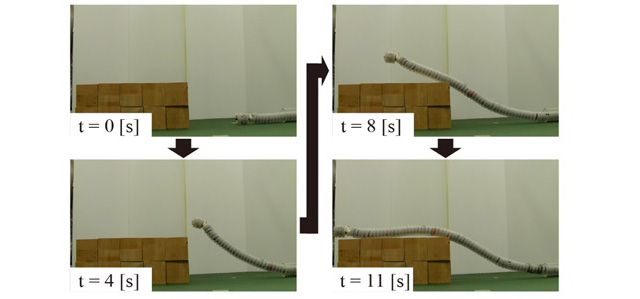
先端浮上による段差乗り越えの様子
これらの機能を実現するため、最大限大きな噴射力が出せる流路とノズルを設計し、先端の浮上に十分な2N程度の力が出せるようにした。また、ノズルをロボットの長軸回りに回転させることで噴射方向の制御が可能となった。さらに、先端を安定に浮上させるため、空気の噴射方向を重力方向に対して一定方向にする機構を考案。これら要素技術の組み合わせにより、能動スコープカメラの先端は高さ20cm程度まで安定して浮上し続けられるようになった。
段差踏破能力についての試験では、後ろから力を加えることなく最大20cmの段差を乗り越えられることがわかった。方向切り替え機能では先端方向を90度変化させる実験を行い、従来26秒かかったものが、空気噴射を用いることで1.6秒と約15分の1に短縮できた。瓦礫環境での走破試験でも、瓦礫を乗り越えて進行することができることが示された。また、先端を浮上させることでがれき内部の状況も把握しやすくなっている。
同グループでは今後、災害模擬フィールドでの試験を繰り返し、耐久性向上や操縦システムの統合化など、災害救助システムとしての実用化を進めるとともに、より移動可能な領域を増やし、移動時間の削減を目指す。将来的には、環境情報を元に空気噴射を制御し、より複雑な段差を素早く踏破することを目指す。