- 2019-12-12
- ニュース, 技術ニュース, 電気・電子系
- ドーナツ型切り紙構造, ヒューマン・マシン・インタフェース, ロボット, ロボットアーム, 伸縮性筋電位計測用電極, 研究, 筋電位, 義手, 豊橋技術科学大学
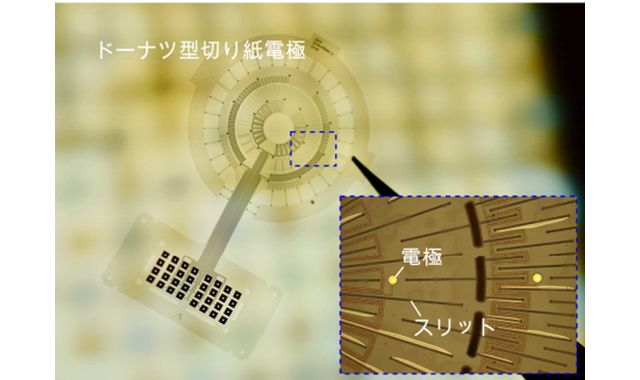
ドーナツ型切り紙構造の電極デバイス
豊橋技術科学大学は2019年12月11日、ドーナツ型切り紙構造の伸縮性筋電位計測用電極を開発したと発表した。将来的には、切断患者の残存筋を用いた義手やロボットアームを制御するヒューマン・マシン・インタフェースへの応用が期待できるという。
筋肉の活動は、筋電位という脳や脊髄から伝わる電気信号によって制御される。事故などによって身体の部位を切断した患者は、その部位の機能を失ってしまうものの、消失した部位を動かしていた筋電位の伝達機能は残されている。近年では、この電気信号を読み取ることで義手などを動かし、失われた機能を回復する技術の開発が行われている。
一方、研究チームは2017年、切り紙構造を用いた高い伸縮性を持つ神経電極を開発。マウスでの実験で、生体信号の計測を実現していた。しかし、心臓や筋肉など、変形が大きい組織では、電極の位置がずれたり、剥がれてしまうという課題があった。
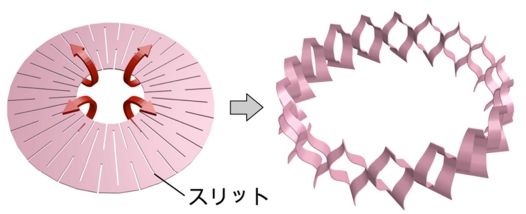
ドーナツ型切り紙構造(左)変形前(右)変形後
そこで、研究チームは今回、円周状のドーナツ型切り紙構造を提案。筋肉からでも、安定的かつ正確に生体信号を計測できる伸縮性電極を開発した。ドーナツ型切り紙構造を持つ電極は、切り込みが入った平面的なドーナツ型のフィルムとして製作。これを開くことで立体的な円筒形状の伸縮性電極となる。伸縮性電極は、腕や脚、指、腹部、心臓など、さまざまな生体組織の信号計測が可能な上、高い密着性を持ち、生体の動きを阻害することもないという。
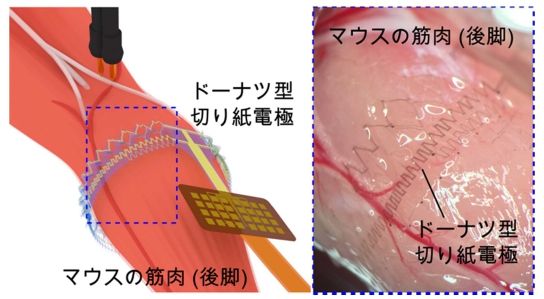
マウス後脚の筋電計測実験(左)実験の模式図(右)マウスの筋肉上に設置されたデバイス写真
しかし、今のところ、機械的な強度や信号の解像度の点で課題があると説明。また、生体に埋め込んだときの影響の確認や、計測した筋電位によるロボットなどの制御も実施したいという。そして、将来的には、切断患者の生活が向上するようなデバイスの実現を目指すとしている。