- 2020-3-27
- 制御・IT系, 技術ニュース
- AI, JST, NII, サーチベースドテスティング, 反例探索, 情報・システム研究機構 国立情報学研究所, 科学技術振興機構, 経路計画プログラム
情報・システム研究機構 国立情報学研究所(NII) はは2020年3月23日、マツダの研究用モデルをもとにして、自動車の危険動作を自動運転の経路計画プログラムから自動検出する手法を開発したと発表した。避けようがない衝突事故が起きるシナリオを検出してしまうという課題があったが、同手法を開発することで、自車の動作修正により衝突を回避できるシナリオだけを自動検出できるようにし、この問題を解決したという。
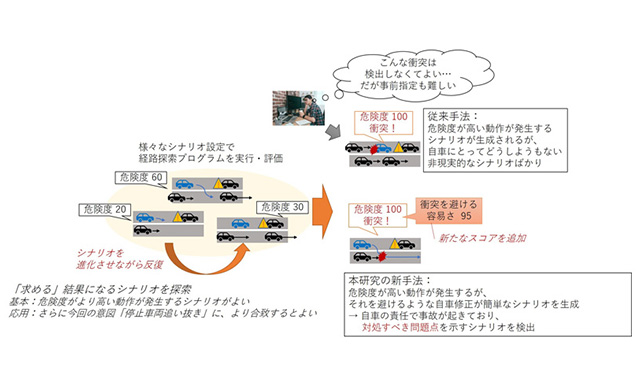
経路計画プログラムにサーチベースドテスティングや反例探索を使用する場合、動作の危険度を各シナリオのシミュレーション結果から算出し、その危険度がより高くなるようにシナリオの変更を繰り返して探索する。これによりAI(人工知能)は、危険な動作を引き起こすシナリオを自動検出する。しかし、この技術を自動運転のように実世界を扱うシステムに使用すると、非現実的なシナリオを作ってしまうという課題があった。
NIIの研究チームは、自動運転システムを対象に、高度な自動テスト生成の技術に取り組んでいる。具体的には、AIの一分野である進化計算の技術を用い、計算機内で生物の進化を模倣する方法を研究している。今回の研究では、この進化計算を用いた手法を改良。課題となっている非現実的なシナリオの生成を解決し、現実的で危険な動作を引き起こすシナリオを自動検出する手法を開発した。
開発技術では、危険性が高い動作、特に衝突を引き起こすシナリオを探索する際に、その衝突を回避できる経路計画プログラムの微修正が可能かも同時に検出。経路計画プログラムで危険な動作を引き起こすシナリオのうち、自車の動作修正によって衝突を回避できるシナリオだけを自動検出できる。
この手法では、経路計画プログラムが不十分で衝突事故が起こってしまうシナリオの検出と同時に、その事故を避けるための修正案も見つけている。しかし、現時点では、その事故が自車の責任であるどうかを判断するためだけに修正案を作成しており、その一つの事故にしか通用しない。
そこでNIIは、次のステップとして、検出した複数の事故全ての動作を改善する修正案の検出など、問題の発見と対処のための知見を自動獲得していくことに取り組んでいる。また、今後は同様のアイデアを用いて、他の種類のシステムの自動テスト生成に取り組んでいくとしている。