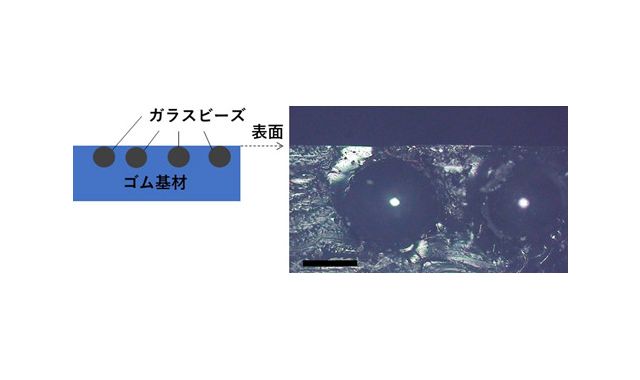
表面近くにガラスビーズが埋めこまれたゴムシート
産業技術総合研究所は2018年2月19日、引っ張ることで簡単に付着力を変化させられるゴムシートを開発したと発表した。新感覚のスポーツ用品のグリップ、高精度なロボットハンドなどへの応用が期待されるという。
同研究所によると、ロボットハンドや、工具、スポーツ用具などに用いられているゴム材料の摩擦特性は、通常そのゴム自身の素材の特性や表面状態に依存する。一方、スポーツ用品や工具類のグリップ、ロボットハンドなどの場合は、「つかむ」(把持)と「離す」(離脱)の過程や状況に応じて異なる付着力を付与する必要があり、応答性や制御性にすぐれたゴム材料の開発が求められてきた。
今回開発したゴムシートは、シリコーンゴムのシートの表面にガラスビーズを埋め込んだものだ。引っ張ると表面に凸凹が発生しゴムと物体の接触面積が低下。付着力が一気に減少する。
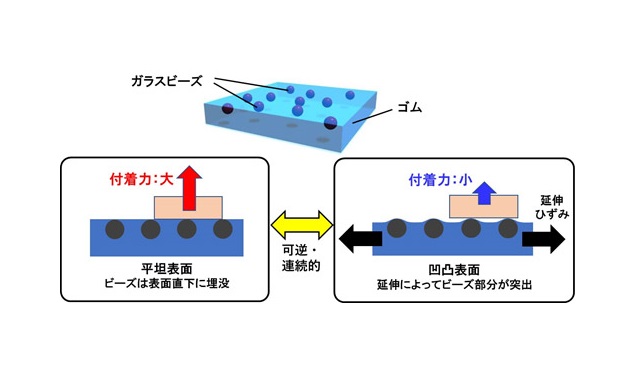
この特性を利用してロボットハンドの表面部材として使用すると、表面が平坦な状態で物体を把持し、輸送した後、目的の場所で伸びひずみを与えて凸凹を発生させることで付着力を低下させて瞬時に物体を脱離できる。このように、その時々の状況によって変化する応答性をもったグリップ素材の開発が可能になる。
また同素材は、汎用のシリコーンゴムとガラスビーズを使って、安価で簡単に作製できるメリットも持つ。
今後はゴム基材やビーズの種類や配置などを変えながら構成材料と付着特性の関係性を調査。摩擦力などの他の特性への効果を調査した上で、材料性能の高度化を目指す。