- 2019-2-12
- 研究・技術紹介
- CAN(Controller Area Network), CASE, Google, IoT, Uber, Velodyne, ダイハツ工業, ダイムラー, テスラ, ディーター・ツェッチェ, レーザーレーダー(LiDAR::Light Detection And Ranging), 自動運転, 芝浦工業大学, 認知科学

芝浦工業大学 システム理工学部 機械制御システム学科 伊東敏夫教授。
ここ数年、日本の基幹産業のひとつ自動車産業を取り巻く状況が、大きく変わりつつある。そのキーワードの一つは「自動運転」。大手メーカー各社が完全自動運転の実用化に向けて開発にしのぎを削るなか、一歩リードしているのは新参のテスラ、あるいはGoogleやUberといった他業種からのプレーヤーだ。
100年に一度とも言われるこの変革期を迎え、自動車はどのように変わろうとしているのか。自動車業界の先を見据え、大学として研究すべきテーマに取り組む芝浦工業大学 システム理工学部 機械制御システム学科 伊東敏夫教授にお話を伺った。(執筆:後藤銀河、撮影:水戸秀一)
――自動運転に関わる研究が主要なテーマと伺いました。
伊東教授:自動車が登場してから100年経ち、今はまさに変革期にあります。ドイツの自動車大手ダイムラーの社長(ディーター・ツェッチェCEO)は、これをCASEというキーワードを使って説明しています。CASEとは、「Connected:コネクティッド」、「Autonomous:自動運転」、「Shared:カーシェアリング」、「Electric:電動化」の4つ言葉の頭文字をとっています。
自動運転、カーシェアリング、電動化は、言葉としてイメージしやすいのではないでしょうか。コネクティッドは、自動車のIoTという意味で、走行中の自動車から多量のデータがインターネットを通して取得できるようになり、自動車にもビッグデータの解析が適用できるということです。
大きなテーマは自動車の自動運転ですが、一言で自動運転といっても、いろいろな分野があります。当研究室では主に3つの研究分野を扱っています。

自動車業界は大きな変革期を迎えており、自動運転は最も重要なキーワードのひとつだ。
日本の自動運転技術は、特にLiDARの活用分野で遅れている
伊東教授:1つは、自動車そのものの自動化や、そのために必要な要素技術の研究です。自動化のキーとなる技術が「レーザーレーダー(LiDAR::Light Detection And Ranging)」と呼ばれるデバイスです。
LiDARは、赤外線パルスレーザーを点状に照射して、対象物に反射して戻ってくる時間によって距離を計測するセンサーです。このレーザーをいろいろなところに打つことで3次元空間の距離のある点群がわかります。ところが構造上、距離が離れると点の間隔がまばらになるので、だんだん形状がわからなくなってきます。こうした状況で、どうやって形を分かり易くするのかということが、具体的な研究テーマになります。
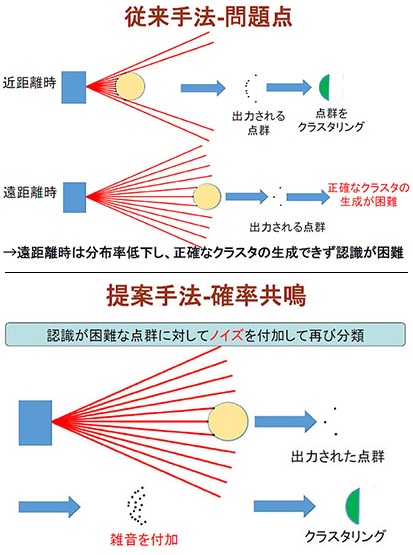
近距離時は点群の数が多く、クラスタリング=物体の識別ができるが、距離が離れるとクラスタが生成できない(上)。そこで信号に雑音を付加する「確率共鳴」という現象を利用して遠距離でのクラスタリングを可能にする。

LiDARを使った小型モビリティ実験車両。
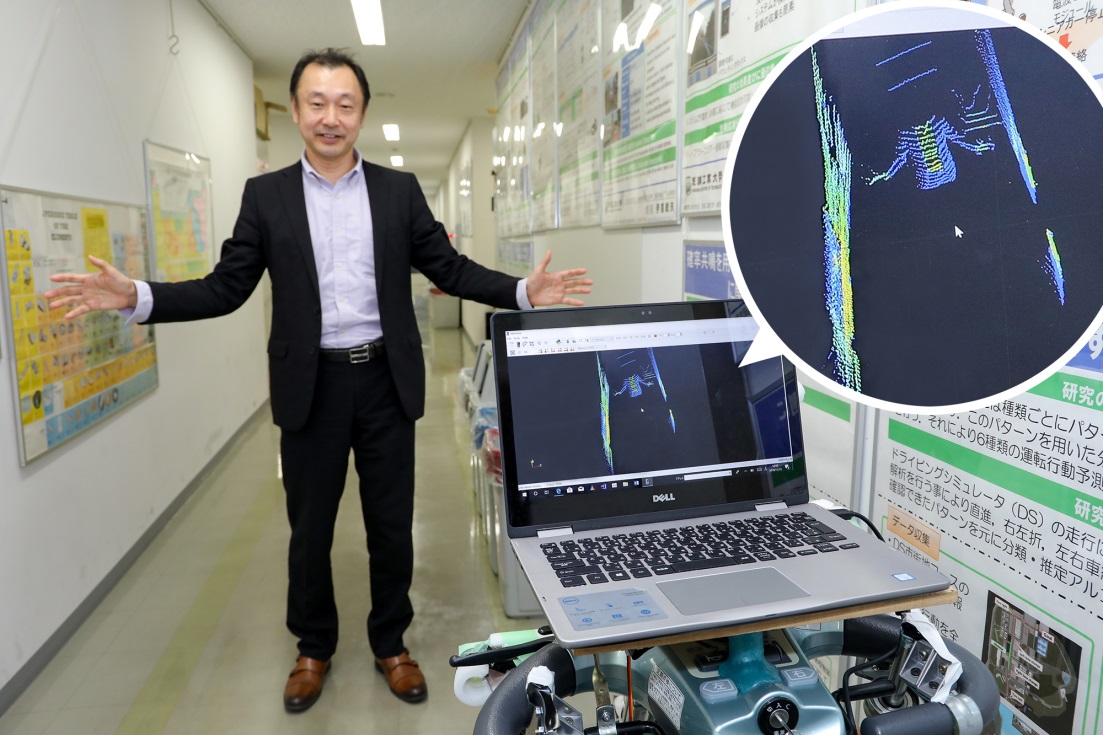
PC画面上にLiDARデータの処理結果が表示される。確率共鳴によって、計測地点から20~80m以内の歩行者や二輪車などの認識性能が改善した。
日本は特にLiDARに関する研究開発が遅れていますので、このLiDARのデータ処理をメインに研究をしています。
――日本の自動運転技術は遅れているということでしょうか?
伊東教授:法律面を含めて、どんどん離されているという状況ですね。欧米の考え方は、機械なので失敗する可能性もあるが、実現すれば事故率が減ることになるので、まずは導入してみようというものだと感じています。しかし日本では、まずは法制度を整えてからという考え方が強いので、レベル3(緊急時を除きシステムが自動運転)やレベル4(限定エリア内は完全自動運転)の自動運転が市場投入され始めると、日本はついていけなくなる可能性があります。
技術的にも、自動運転はLiDARを使わないと実現できない領域があることがわかっています。諸外国、特にアメリカやヨーロッパではLiDARにシフトしていますが、日本ではまだそれができていません。LiDARを作っているサプライヤが日本にないこともあり、国内の自動車メーカーがリードする形になっていません。産学連携での研究開発がよく話題になっていますが、当研究室でも何社かと共同研究しています。私はカメラを使った研究もやりますが、あくまで補助的なもので、要素技術としてはLiDARが中心です。
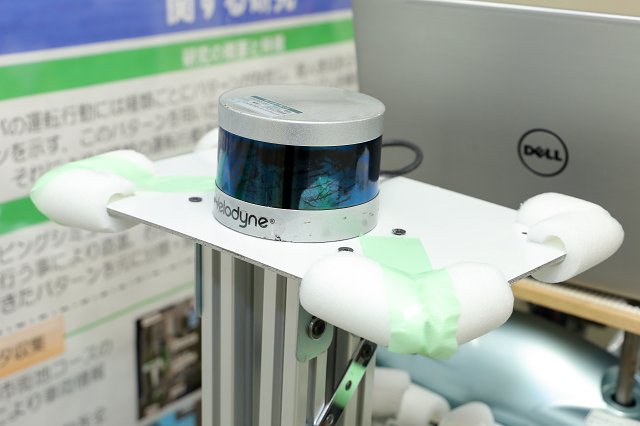
伊東研の実験車両に装着されたLiDAR。現状国産品はなく、これは最大手のアメリカVelodyne社製。
今後30年くらいは部分自動運転が主流という状況が続く
伊東教授:次に2つ目の分野は、自動車のインターフェースに関する研究です。自動運転といっても、手放しで運転ができるようになるのは、なかなか難しい。もちろん用途や区間を限定して、商用サービスとして監視をしながらであれば、完全自動運転は実現可能です。
ただ、普通の乗用車を完全自動運転にするには、あと30年くらいはかかると思っています。これは、自動運転システムが故障したり、自動運転では対応できない状況になった場合、ドライバーの手動運転に替わる必要があるということです。
技術の問題もありますし、社会の受容性、法律などの話もありますので、私は運転の切り替えがあるような部分自動運転という状況がしばらく続くと見ていて、そういう状況に対応した研究が必要だろうと考えています。
――部分自動運転ならではの難しさがあるということでしょうか。
伊東教授:自動運転が登場するまでは、ドライバーは常にハンドルを握って前を向いて運転しなければならないわけですが、これが一部解放されるので、ややこしい問題がでてきます。自動運転時と、ドライバーによる運転時の、その狭間はどうするのか。こうした切り替えが起きうる部分自動運転における最適なヒューマンインターフェースが研究テーマになります。
自動運転中は運転操作をしないため、疲労も取れて快適です。しかしドライバーは安心してしまって反応時間が落ち、極端にいえば眠くなります。安全な状況なら寝ても良いですが、自動運転が解除されて切り替わる状況では、絶対に寝てはいけません。そこで、ドライバーの状態がどう変わるのか、いろいろな生体センサーをつけて脳波と心拍の数値を測定し、ドライバーがどのような状態にあるのかを推定します。このように、いつでも運転が替われる状態にするためにはどうすればよいのかという研究をしています。

伊東研のドライビングシミュレーターには、実際の首都高速環状線のデータが入っており、リアルな走行条件の再現が可能だ。

こちらは実車走行のための試験車両の内部。左ハンドル車の助手席側にデータ取得用の操作機器が設置されており、実際の運転状態に近いデータの取得が可能だ。
車両の制御データからドライバーの状態を推定する
伊東教授:そして、3つ目の分野がデータ解析です。今の自動車には、CAN(Controller Area Network)という車載ネットワークが張り巡らされていて、ドライバーの操作情報や車の情報は、すべて制御CANデータとして取得することができます。このCANデータの解析を情報処理としてやっています。
ステアリングやペダルの操作データをみれば、ドライバーが操作した量がわかります。このデータを継続的に取得してAIで処理することで、例えばドライバーが疲れているのか、居眠りをしているのか、普段と異なる健康問題があるのではないか、そうしたことがわかるので、ドライバーに適切にフィードバックすることができるようになります。
LiDARなどデバイス寄りの研究もやっていますが、このデータ解析は認知科学の領域も入ってきます。認知科学的には、人間のほとんどの状態で無意識のうちに行動が決定されていると言われています。
野球でボール球に手を出してしまったという経験がある人もいると思いますが、あれは意思ではなくて無意識でプログラムされています。バットを振るか振らないかという判断の前に、筋肉が動き出してしまう。自動車の運転も同じで、法律やルールではドライバーが100%意識してコントロールしていることになっていますが、実際には99%は瞬間的な判断、慣れの判断だと言われています。
無意識の行動モデルというものですが、生理科学的な実験で、ある指令を聞いて手を伸ばす場合、指令を聞いて手に命令を出す前頭葉の部分と筋肉を動かす命令の部分は、脳の別の場所にあります。ここに電極を付けて電位差を見ると、筋肉を動かす命令のほうが0.3秒早く出ていることがわかります。つまり、0.3秒早く無意識のほうが動いていて、実は自分が命令をだして動かしたと錯覚しているんです。こういう観点でデータ解析をすると、いろいろと興味深いことがわかってきます。
将来を見据えた研究課題に取り組めるのは、大学ならでは
――研究テーマを選定されたきっかけを教えてください。
伊東教授:私は芝浦工大での任官に至るまで、ダイハツ工業で自動車の自動化に関する研究開発を進めてきました。当時、自動運転向けの各種センサーを開発していて、やはりドライバーとしては人間が一番優秀で、これに置き換わるようなシステムはなかなかできないだろうと考えていました。
完全な自動運転は、道路や信号システムなどのインフラや監視システムなどとドッキングしないと難しいと思っていて、そうなると当面は部分自動運転しかありません。では、それを前提としたマシンインターフェースはどうあるべきかを研究しておかないといけないだろうと考えたのがきっかけです。
大学の良さは、10年以上先をみた研究ができること。
――企業と大学で、研究開発に対する考え方の違いは何でしょうか?
伊東教授:モノを作るということは企業のほうが得意ですが、大学では新しいデータ解析方法であったり、将来を見据えた研究であったり、企業とは違う視点での研究になります。企業だと、ものづくり自体が事業活動ですので、次に発売する車種をターゲットにした開発だったり、割と短い期間しかやらないので、10年以上先を見据えたような研究はなかなか手掛けられません。また、認知科学の視点からデータを解析するというアプローチも企業では難しいでしょうね。こういう分野は、やはり大学でやるべきだと思っています。
――研究テーマは、どのような成果として、社会に活かされていくのでしょうか?
現時点では、分かり易いところですと、どういう運転をすると燃費が良くなるのか、事故のリスクが減って安全な運転ができるのか、といったことが成果として出ています。ドライバーの無意識の操作を機械学習で解析して、脳が気付く前に無意識が気付いた状態をフィードバックすることもできます。
こういう研究を経験した学生が企業に入ると、大学での研究を活かすことができ、企業の製品開発に貢献できるのではないでしょうか。うちの卒業生は、自動車メーカーや自動車部品関連メーカーに就職するケースが多いですね。
研究とは、どんなに小さくても世界初をやること
――最後に学生へ向けたメッセージをお願いします。
伊東教授:私がよく学生に話していることですが、研究というのは世界で誰も解いたことのない問題を解くことです。卒業研究というからには、どんなに小さくてもいいから世界で初めてのことをやれと言っています。企業の研究所に入って研究を続けられるような人は、それほど多くありません。大半の学生は、今しか研究する機会がありません。
世界で初めてのことをやったという実績は、会社に入ってからも必ず自分の役に立ちます。自分の存在意義ともいえますし、人の役にも立つことになりますから、難しくとも頑張って欲しいですね。
自動運転シミュレーターの前で研究室の学生と。
関連リンク

ライタープロフィール
後藤 銀河
アメショーの銀河(♂)をこよなく愛すライター兼編集者。エンジニアのバックグラウンドを生かし、国内外のニュース記事を中心に誰が読んでもわかりやすい文章を書けるよう、日々奮闘中。