- 2019-3-14
- ニュース, 技術ニュース, 機械系
- NEDO, ロボットアーム, ロープによる関節駆動機構, 多関節駆動機構, 廃炉調査, 新エネルギー・産業技術総合開発機構, 日本原子力研究開発機構, 東京工業大学, 楢葉遠隔技術開発センター, 研究, 超長尺多関節ロボットアーム, 高強度化学繊維ロープ, 高強度化学繊維ロープによる腱駆動
新エネルギー・産業技術総合開発機構(NEDO)と東京工業大学(東工大)は2019年3月13日、開発した全長10mの超長尺多関節ロボットアームで、10kgの物体を水平方向に保持できることを実証したと発表した。
老朽化した橋梁や大規模構造物の点検は重要課題であり、人による作業が難しい場所でのロボットアームの応用は喫緊の課題とされている。そこで、NEDOと東工大は2018年9月、可動域が最大高さ10mで水平8mの世界最長の超長尺多関節ロボットアームを開発していた。
そして今回、ロープによる新たな多関節駆動機構を開発し、またそのロープとして高強度化学繊維ロープを用いて腱駆動させることで、ロボットアームで10kgの物体を水平方向に保持できることを実証した。

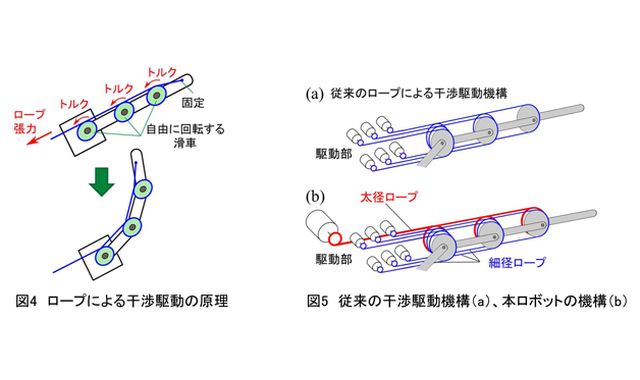
ロープによる関節駆動機構では、手先関節を動かすためのトルクも根元関節の駆動に利用できるため、根元部分で大きなトルクを発生させることができる。この機構に対し、今回新たに太径のロープを1本通すことで、アーム自重の大部分を太径ロープで支えることを考案。各関節の細かな動きを細径ロープで個別に制御することに成功した。これにより、複数の化学繊維ロープで荷重を分散して支えることができ、従来に比してさらに大きな手先荷重を支えることが可能となった。
また、このロープとして、軽くて強いものの、伸びてしまう特性や滑りやすいため端部を固定することが難しかった高強度化学繊維ロープを選択。これらの課題を解決する駆動機構要素群の開発を行い、実際にロボットアームに適用。その有効性を確かめることに成功し、高強度化学繊維ロープ腱駆動によるロボットシステム構築の手法を系統的に確立した。
今回の実証により、橋梁やトンネルなどの大規模構造物のインフラ点検作業などへの応用が期待できるという。また、2019年度に日本原子力研究開発機構の楢葉遠隔技術開発センター(福島県)で、廃炉調査への利用可能性を検討する予定だ。