

タグ:超長尺多関節ロボットアーム
-
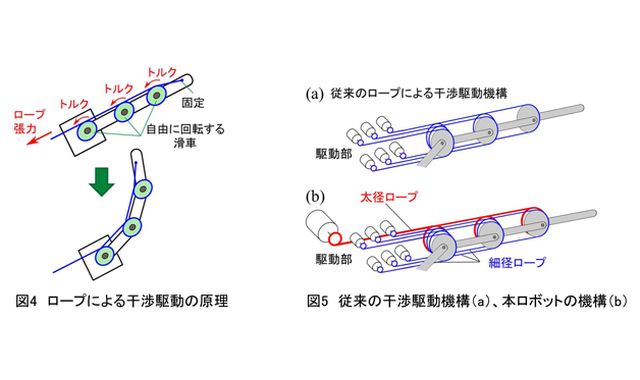
世界最長10mの超長尺多関節ロボットアームで水平方向10kg保持を達成――高強度化学繊維ロープによる新たな多関節駆動機構を開発 NEDOと東工大
新エネルギー・産業技術総合開発機構(NEDO)と東京工業大学(東工大)は2019年3月13日、開発した全長10mの超長尺多関節ロボットアームで、10kgの物体を水平方向に保持できることを実証したと発表した。 老朽化…詳細を見る-
-


2024-11-18
世界初のオープンイヤー型ヘッドホン向けノイズキャンセリング技術を開発 NTT

2024-11-20
熱を発し自己修復もするサステナブルなコンクリートを開発――道路の除雪や除氷に期待




Copyright © fabcross for エンジニア All rights reserved.