- 2019-4-11
- ニュース, 機械系, 製品ニュース
- 2.0Lダイナミックフォースエンジン, 2.5Lダイナミックフォースエンジン, 4WDシステム, Direct Shift-CVT, E-Four, RAV4, ダイナミックトルクベクタリングAWD, ディスコネクト機構, トヨタ自動車, トルクベクタリング機構, 新型2.5Lハイブリッドシステム
トヨタ自動車は2019年4月10日、新開発した4WDシステム「ダイナミックトルクベクタリングAWD」を搭載した新型「RAV4」を発売したと発表した。
新型RAV4には、ガソリン車の「X」「G」「“Z package”」「Adventure」の4モデルと、ハイブリッド車の「HYBRID X」「HYBRID G」の2モデルを用意した。

Adventure(オプション装着車)
ガソリン車のパワートレーンには、直列4気筒直噴エンジン「2.0Lダイナミックフォースエンジン」と、無段変速機「Direct Shift-CVT」を搭載。両者を組み合わせることで、優れた走行性能と燃費性能を両立した。
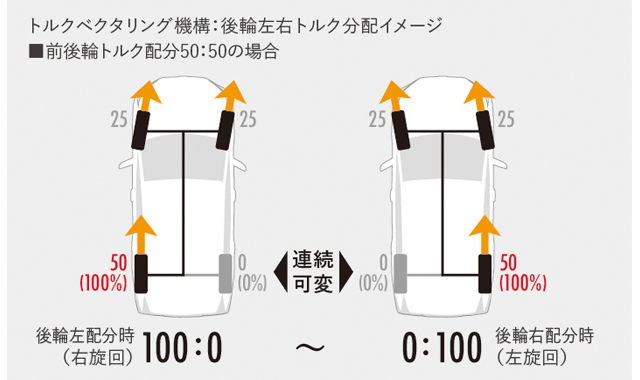
また、「“Z package”」「Adventure」の2モデルには、新開発の4WDシステムであるダイナミックトルクベクタリングAWDを搭載した。同4WDシステムは、走行状況に応じて、前後トルク配分に加え、後輪トルクを左右独立で制御する「トルクベクタリング機構」を採用。さらに、4WD走行が不要と判断した時には、後輪に動力を伝達させる駆動系を切り離して燃費向上を図る「ディスコネクト機構」も採用している。
一方ハイブリッド車には、「2.5Lダイナミックフォースエンジン」を搭載した、新型2.5Lハイブリッドシステムを採用。優れた燃費と加速性能を実現した。
また、ハイブリッド車の4WDシステムとしては、新型「E-Four」を採用。後輪の最大トルクを増加させるとともに、前後輪トルク配分を100:0~最大20:80まで変更可能だ。コーナリング中の前後輪トルク配分の制御性能も向上させている。