- 2019-9-23
- 技術ニュース, 機械系, 海外ニュース
- 3Dプリンティング, アクチュエータ, シンガポール工科デザイン大学(SUTD), ソフトロボット, 光造形方式, 南方科技大学, 学術, 浙江大学
(C)Singapore University of Technology and Design
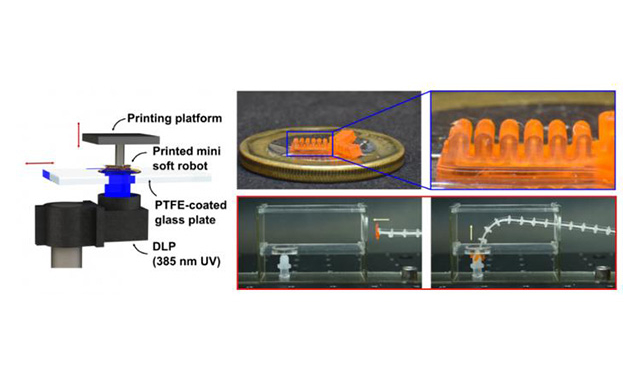
光造形方式(DLP)の3Dプリンティングによって、硬貨よりも小さいサイズの空圧式アクチュエータを作成できる手法が考案された。シンガポール工科・デザイン大学、南方科技大学、浙江大学の研究グループによるもので、2019年8月15日、『Advanced Materials Technologies』に掲載された。
研究グループが作り出したアクチュエータは、ソフトロボット向けのものだ。ソフトロボットは複雑な環境に安全に適応することができて、近年急速な成長を遂げている。メートルからサブミクロンまで、ソフトロボットの大きさは幅広いが、特に、ミリメートルサイズの小型ソフトロボットは、空圧で駆動する小型アクチュエータと組み合わせられる。密閉空間での作業や小さな物体を移動させるのに向いているため、実用性が高いのではないかと関心を集めている。
そんなミリメートルサイズのソフト空圧式ロボットの可能性を広げるには、サイズをもう1桁以上小さくすることが求められている。鋳造やソフトリソグラフィーなどの従来の手法で製作しようとすると非常に繊細な作業が必要となるが、DLP方式などの3Dプリント技術を使うことで理論上は高解像度で形作れるようになると見込まれている。しかし、マイクロサイズの穴や溝を処理しようとすると目詰まりを引き起こしやすく、依然として課題が残されている。実際、3Dプリンティングによって小型ソフト空圧式ロボットを作り出すことに成功した例は数少ない状況だ。
一般的に、DLP方式の3Dプリンティングでは、解像度を高めるためにポリマー溶液に光硬化剤を添加する。このとき、添加量が多過ぎると材料の弾性が急速に低下し、ソフトロボットが変形後の形状を維持しづらくなる。つまり、プリンティングの精度と機械的性能のバランスを取る必要があった。
研究グループはまず、3Dプリンティングに利用する紫外線の波長で良好な吸光度を持つ光硬化剤を選び、機械的性能試験に基づいて適切な材料配合を決定した。次に、露光時間と1層当たりの厚みを変えながら、再現性・忠実性が高くなる組み合わせを探っていった。
こうして研究を進め、さまざまな小型ソフト空圧式ロボットアクチュエータを製作した。全体のサイズは2〜15mm、フィーチャーのサイズは150〜350μmになり、どれも1シンガポールドル硬貨よりも小さいサイズに収まったという。独自に開発した3Dプリンティングシステムを利用して製作したが、市販のSLA方式かDLP方式の3Dプリンターでも、同じ手法を使って小型アクチュエータを製作できるようになると見込んでいる。
応用例として、連続体マニピュレータと3Dプリントされた小型ソフト空圧式グリッパーから成るソフトデブリ除去装置も考案。狭い空間を進み、手の届きにくい位置にある小さな物体を集められるという。
今回、開発した小型アクチュエータを利用したソフトロボットを研究していくことで、将来的にはジェットエンジンのメンテナンスや低侵襲手術などに応用できるのではないかと研究者たちは期待している。
関連リンク
Researchers develop process flow for high-res 3D printing of mini soft robotic actuators