- 2019-11-25
- 技術ニュース, 機械系, 海外ニュース
- HERMES(Highly Efficient Robotic Mechanisms and Electromechanical System), Joao Ramos, Little HERMES(リトルヘルメス), Science Robotics, バランスフィードバック, ヒューマノイドロボット, マサチューセッツ工科大(MIT)
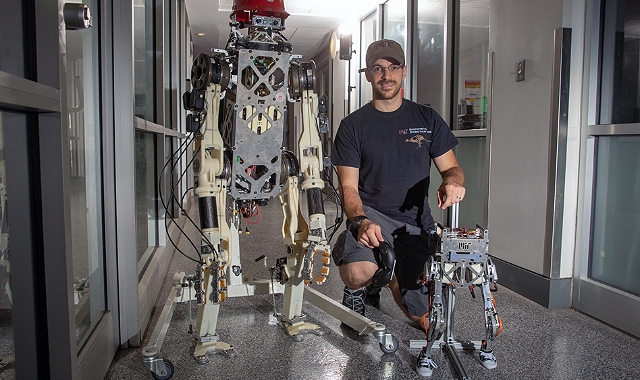
Photo: Tony Pulsone
米マサチューセッツ工科大(MIT)の研究チームは、下肢の動きとバランスに特化した2脚ロボット「Little HERMES(リトルヘルメス)」を開発した。新しく開発した「バランスフィードバック」技術を搭載し、オペレーターの動きと同期して動いたりジャンプしたりすることができる。研究成果は、2019年10月31日付けの『Science Robotics』に掲載されている。
Joao Ramos氏を中心としたチームは、2015年からヒューマノイドロボット「HERMES(Highly Efficient Robotic Mechanisms and Electromechanical System)」の開発をしている。HERMESは遠隔操作が可能で、コントローラーを装着した人間の動きに同期して動き、例えばカップにコーヒーを注ぐような動作ができる。
ところがこれまでのHERMESは、上半身の動きは真似できるものの、下肢のバランスの取り方が不十分なため、重いものを動かそうとすると転倒する恐れがあった。今回研究チームは、下肢の動きとバランスの調整に特化したシステムとして、胴体と脚を持つLittle HERMESを開発した。HERMESと比べると小型だが、オペレーターがコントローラーを装着して遠隔操作する点は同じだ。
Little HERMESには、オペレーターが実際にその場で足踏みしたり、ジャンプしたり、体を揺らしたときの動きをベースに「バランスフィードバック」モデルを作成し、Little HERMESへその動きを転送できるようにした。また、このモデルではロボットの動きを制御できるだけでなく、逆にロボットの動きを感じることもできる。
実験では、ロボットが外部から刺激をうけてバランスを崩しそうになると、オペレーターはコントローラーを引っ張られるようなフィードバックを感じ、それに対応するように動いた。その結果としてロボットもシンクロして転倒することなくバランスを保つことができた。
今後は、フルボディのヒューマノイドロボットにバランスコントロール機能を搭載し、災害現場で障害物の撤去や、救護活動に役立てたいとしている。
関連リンク
Two-legged robot mimics human balance while running and jumping