大阪大学は2021年4月23日、動物の神経および筋肉の特性を再現する四脚ロボットを開発し、猫が安定して歩行するための反射回路の候補を発見したと発表した。
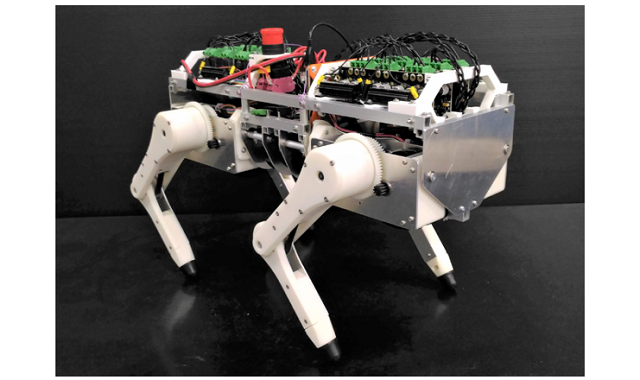
近年、動物愛護の観点から、動物を用いた実験は厳しく管理/制限されている。しかしその反面、動物のしくみに関する研究が遅れざるを得ない状況にある。今回同大学は、実際の動物の神経や筋肉の特性をコンピューター上で再現し、それに基づいて歩行する四脚ロボットを開発。これを用いることで動物を用いなくてもさまざまな動物のしくみに関する実験ができようになる。
これまで猫の歩行に関わる神経機構は実験によっていくつか発見されていたが、これらの神経機構が動物の体の中でどのように統合されているのかは明らかになっていなかった。今回開発した四脚ロボットを使った歩行実験によって、猫が安定した歩行を生み出す反射回路を探索。その結果、「腰/膝伸筋間の相互興奮性回路」というシンプルな構造をもつ反射回路を発見した。
腰/膝伸筋間の相互興奮性回路とは、膝関節を伸ばす筋肉が力を受けたときに腰関節を後ろへ伸ばし、腰関節を伸ばす筋肉が力を受けたときに膝関節を伸ばすような神経の回路だ。これをロボットの脚に再現するだけで、安定した歩行運動ができ、同回路を切断すると歩行リズムが不規則になった。また、同回路を刺激すると猫と同様の支持脚期延長現象(支持脚が地面についたままで、踏み出せなくなる現象)が起こることも観察された。これらにより、相互興奮性回路が猫の歩行を司る重要な回路であることが示唆されるという。
今回の研究成果は、動物実験に代わるロボットによる実験によって、従来より幅広い条件下での実験が可能になり、生物学の進展に貢献することが期待される。さらに、ロボットを動物の構造に近づけることでロボット工学における生物規範ロボティクスと呼ばれる研究領域にも貢献することが期待される。