- 2021-8-25
- 技術ニュース, 機械系, 海外ニュース
- k近傍法(kNN), サポートベクターマシン(SVM), ニューラルネットワーク(NN), フロリダアトランティック大学, ランダムフォレスト(RF), 学術, 接触点(インターフェース), 液体金属触覚センサー(LMS), 義手, 触覚受容器, 質感(テクスチャー)
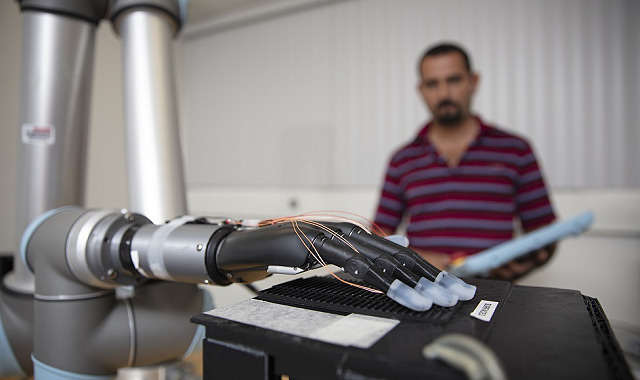
Photo by Alex Dolce
米フロリダアトランティック大学は、義手の指先の触覚を階層的に統合することで、複数の質感(テクスチャー)がある表面を同時に識別することが可能になったと発表した。この研究は2021年6月24日付で『Sensors』に掲載された。
人間のそれぞれの指先には3000個以上の触覚受容器があり、主として圧力に反応する。人間は物を手で扱うとき、指先の感覚に大きく依存している。この感覚がないということは、上肢を切断した人に特有の課題だ。現在、ハイテクで手先を器用に動かせる義肢はいくつかあるが、どれも「触っている」という感覚をユーザーは得られない。この感覚フィードバックがないために、そのような義手で物を持っていても、誤って落としてしまったり押しつぶしてしまったりする。
義手向けの触覚センサーについてはかなりの研究がなされてきているが、依然として軽量、低コスト、堅牢なマルチモーダル触覚センサーの進歩が求められている。
そこで、研究チームは、義手の接触点(インターフェース)でより自然な感覚を感じられるようにするため、高伸縮性の液体金属触覚センサー(LMS)を設計。フォトリソグラフィーで作製したLMSを、義手の指先部分に初めて組み込んだ。シリコンベースのエラストマーで作られたマイクロチャンネルに液体金属を封入しているこのセンサーは、従来のセンサーに比べて、伝導性、コンプライアンス性、柔軟性、伸縮性が高いといった重要な利点がある。
今回の研究では、義手の個々の指先を使って、さまざまなテクスチャーの表面を滑るように動かす速度について識別を行った。4種類のテクスチャーの可変パラメーターは1つで、隆起部の間の距離を変えて設定した。テクスチャーと速度を検出するため、4つの機械学習アルゴリズムに学習をさせて、その分類能力を比較した。採用した機械学習アルゴリズムは、k近傍法(kNN)、サポートベクターマシン(SVM)、ランダムフォレスト(RF)、ニューラルネットワーク(NN)だ。
そして、4種類のテクスチャーをランダムに組み合わせて配置した10種類の複雑な表面を、機械学習アルゴリズムが識別する能力を調べるため、10種類の表面それぞれで20回ずつ試験が行われた。
その結果、義手の指4本の先端部に搭載したLMSからの触覚情報を統合することで、複数のテクスチャーがある複雑な表面を同時に識別できた。また、速度とテクスチャーを1本の指を使って検出した場合、NNが最も優れた性能を発揮し、複数のテクスチャーを持つ10種類の表面を、4本の指先のLMSを使って同時に識別する際もNNは99.2%の精度を示した。
これは新しい形の階層的な知性を実証したといえる。この新技術により、義手の制御の改善や、上肢を切断された人が物に触れている感覚を再び取り戻せるような触覚フィードバックを提供できるようになるかもしれない。
関連リンク
LIQUID METAL SENSORS AND AI COULD HELP PROSTHETIC HANDS TO ‘FEEL’
Hierarchical Tactile Sensation Integration from Prosthetic Fingertips Enables Multi-Texture Surface Recognition