- 2022-12-2
- 技術ニュース, 機械系
- IPMC, IPMCセンサー, イオン導電性高分子センサー, ソフトロボットハンド, フレキシブルセンサー, 屈曲センサー, 産業技術総合研究所, 産業技術総合研究所ナノ材料研究部門, 産総研, 研究, 立命館大学
産業技術総合研究所(産総研)ナノ材料研究部門は2022年12月1日、立命館大学と共同で、ソフトロボットハンドの屈曲センサーにイオン導電性高分子センサーを用いて、ソフトロボットハンドが物をつかむ際の指を曲げ伸ばす「動き」と、屈曲度合いの「形状」を検出でき、つかんだ物を落としたことも判断できることを発表した。食品などの柔らかい物をつかみ、パック詰めするロボットの実用化が期待できる。
研究では、燃料電池等に使用されるイオン電解質ゲル膜の両面に、金を化学メッキしたイオン導電性高分子貴金属接合体(IPMC)をフッ素樹脂フィルム中に封止し、イオン導電性高分子センサーであるIPMCセンサーを作製した。
その後、空気の圧力で駆動するソフトロボットハンドの指にこれを取り付け、電圧をモニターし、どれくらいの感度でソフトロボットハンドの状態(動きや形状)を検出できるのか調べた。圧電式センサーと静電容量式センサーでも、同様のソフトロボットハンドに取り付けて実験を実施。センサーとしての性能を比較した。
その結果、圧電式センサーは、ソフトロボットハンドのつかむ動作に伴う屈曲変形は検出できたが、つかんだ状態である屈曲状態を保持しているかどうかは判別できなかった。静電容量式センサーは、つかんだ状態は検出できたが、つかむ動作の開始瞬間のソフトロボットハンドの振れは検出できなかった。
しかし、IPMCセンサーは、ソフトロボットハンドの屈曲や振れを高感度に検出。さらに、つかんだ状態も検出した。この結果から、IPMCセンサーは、圧電式センサーと静電容量式センサーの両方の良い面を併せ持つといえる。
次に、食品にソフトロボットハンドがじかに触れることから、ソフトロボットハンド内部にフレキシブルセンサーが埋め込まれている方が衛生的だと考え、ソフトロボットハンドの内部に、各フレキシブルセンサーを埋め込んだ際の感度を比較した。その結果、IPMCセンサーは、ソフトロボットハンドの内部でもつかんだ状態を検出。一方、静電容量式センサーは、変形に対する感度が大きく低下した。
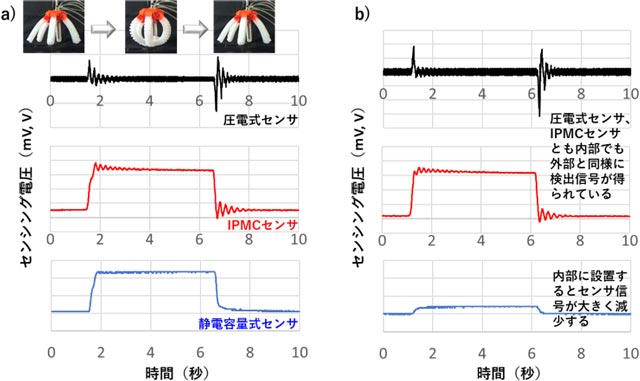
把持時の圧電式センサー、静電容量式センサーとIPMCセンサーの発生電圧の比較
(a.ソフトロボットハンドの外部に設置、b.ソフトロボットハンドの内部に設置)
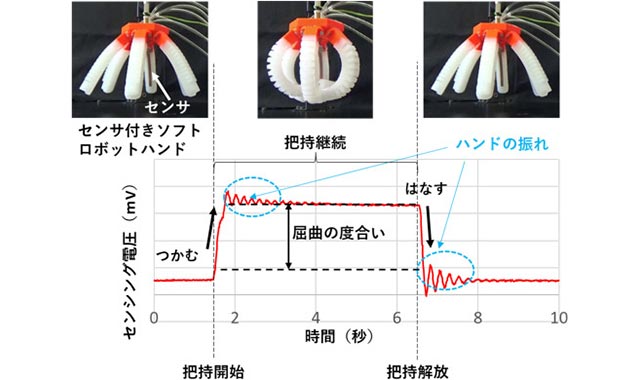
ソフトロボットハンドが物をつかみ、その後、物がソフトロボットハンドから滑り落ちた時のセンサー信号変化を調べると、IPMCセンサーと静電容量式センサーは、つかんだ物体の大きさがわかることが明らかになった。さらにIPMCセンサーは、つかんだ物の落下も検出できた。
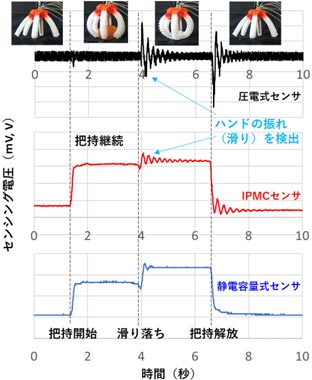
みかんを把持した時と把持していたみかんが滑り落ちた時の各種フレキシブルセンサーの電圧信号変化の比較
(センサーはソフトロボットハンドの外部)
食材は一般に柔らかく、形状も多様なことから、従来の硬いロボットハンドではなく、柔らかいソフトロボットハンドでつかむ必要がある。しかし、圧電性高分子を用いた従来の圧電式センサーは、ソフトロボットハンドの指を曲げ伸ばして物をつかんだり離したりする「動き」しか検出できなかったため、物をつかんで静止した後、指がどの程度屈曲しているかという「形状」を定量的に検出することが困難だった。
誘電エラストマーを用いた静電容量式センサーは、変形の大きいソフトロボットハンドの外表面に取り付ける必要がある。さらに、どちらのセンサーも、物がソフトロボットハンドから滑り落ちてもそれを検出し、判断することができなかった。
今後、IPMCセンサーをはじめとするイオン導電性高分子センサーを改良し、信号の検出能力向上によって、検出電圧からつかんだ物体のサイズや質量を推定することを目指す。つかんだ物体の仕分けや、つかめなかったときにつかみ直せることから、食品のパッキングや商品集荷作業の省人化への貢献が期待できる。