- 2022-12-12
- 技術ニュース, 機械系, 海外ニュース
- Jie Yin, Science Advances, スイミングソフトロボット, ソフトロボット, ノースカロライナ州立大学, バタフライボット, マンタ, 学術, 生体力学
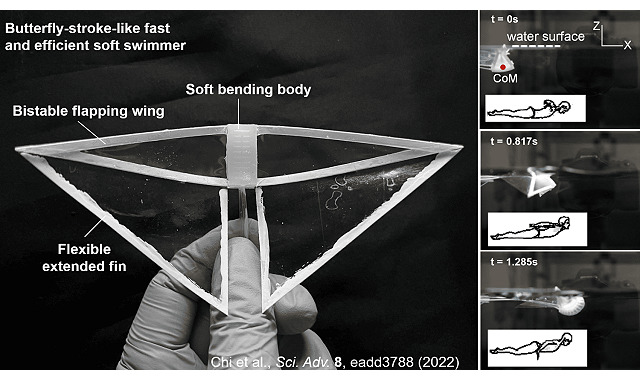
ノースカロライナ州立大学の研究者らは、マンタの生体力学にヒントを得て、エネルギー効率の高いソフトロボットを開発した。このロボットは、これまでのスイミングソフトロボットよりも4倍以上速く泳ぐことができ、泳ぎ方がバタフライ泳法に似ていることから、「バタフライボット」と呼ばれている。
この研究論文の著者で、ノースカロライナ州立大学機械・航空宇宙工学科の准教授であるJie Yin氏によると、従来のソフトロボットは1秒間に1体長以上の速さで泳ぐことができなかったという。今回研究チームは、2種類のバタフライボットを開発した。1つはスピードに特化したもので、1秒間に平均3.74体長の速度を出すことができた。もう1つは、左右に急旋回することができる機動性に優れたもので、この試作機では、1秒間に1.7体長の速度を出すことができた。
バタフライボットは、ヘアクリップのような双安定性を備えた翼が、柔らかいシリコンのボディに装着されている。翼の上下2つの安定状態の切り替えは、ボディの中にあるチャンバーに空気を送り込むことでコントロールしている。このチャンバーが膨らんだり縮んだりすると、ボディが上下に曲がり、それにつれて翼も前後に折れ曲がる。
2種類のバタフライボットのうち速度が速い方は、1個のソフトボディで両翼を駆動している。そのため、速度は非常に速いが、左右に曲がるのが難しい。もう一つの操縦性の高いバタフライボットは、2個の連結した駆動ユニットのそれぞれに翼が接続されているため、両側の翼を動かすことも、片方の翼だけを動かして急旋回することもできる。
Yin氏によると、これまでの羽ばたき型ロボットは、モーターを使って翼を直接駆動する方法が主流だったが、今回の研究では、中央のボディを動かすことで受動的に駆動する双安定性の翼を使用している。これは重要な違いであり、設計を簡素化し、重量を減らすことができるのだという。
「現在のプロトタイプは、ソフトボディに空気を送り込むための細いチューブが繋がれていますが、自律的なバージョンの開発に取り組んでいます」とYin氏は述べている。
この研究成果は2022年11月18日付けで『Science Advances』に掲載されている。