- 2023-8-7
- 技術ニュース, 機械系, 海外ニュース
- 3次元動作, Advanced Materials, イモムシ, キュウリ, ソフトロボット, プロファイル, ポリマー, マサチューセッツ工科大学(MIT), 人工筋肉, 学術, 磁性スパイラル, 磁気作動デバイス, 磁石
McGovern Institute/YouTube
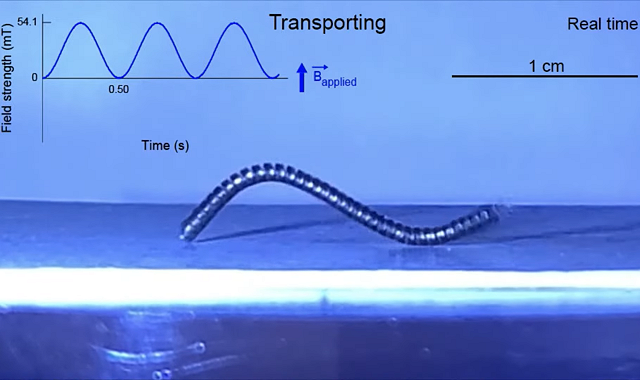
マサチューセッツ工科大学(MIT)は、弱い磁石で制御できる小型のソフトロボットを開発した。ゴム状の磁性スパイラルで形成されたこのロボットは、歩く、這う、泳ぐなどの動作をプログラムすることができる。
研究チームによると、1次元の磁場でロボットの3次元動作を制御できるようになったのは、これが初めてだという。ボディーは柔らかいポリマーで構成され、ロボットを動かすのにそれほど大きな磁場は必要ない。この磁気ロボットに関する論文は2023年6月3日付で学術誌『Advanced Materials』に発表された。
このロボットのボディーには、剛性の異なる2種類のゴムを貼り合わせて加熱、引き延ばして長くて細い繊維状にしたものが使われている。この2種類のゴムは性質が異なるため、一方のゴムはこの伸張工程でも弾性を保つが、もう一方のゴムは変形した状態になり、元のサイズに戻れなくなる。そのため、伸びが解除されると繊維の片側のレイヤーが収縮し、全体が縮んだコイル状になる。これは、細胞の一層目が水分を失うと二層目よりも早く収縮して、らせん状になるキュウリのツルをモデルにしているという。
そして第3の材料、つまり磁化できる粒子を含むものは、ゴム状繊維を通る流路に組み込まれており、コイルが形成されることで、特定の動きを可能にする磁化パターンを導入することができる。
研究チームは、磁場をかけたときに、ロボットが実際に歩いたり這ったりするような力のプロファイルを確立するにはどうしたらいいかを慎重に計算した。例えば、イモムシのように這うロボットを作るには、らせん状の繊維を緩やかな起伏に成形し、胴体、頭部、尾部を磁化して、ロボットの運動面に垂直に磁場をかけることで胴体を圧縮する。磁場がゼロになると圧縮が解除され、ロボットは伸びる。これらの動きにより、ロボットは前進する。また、2本の足のようならせん状の繊維が関節でつながっている別のロボットは、より歩行に近い動きを可能にするパターンで磁化されている。
研究チームによれば、このようなソフトロボットは、生産規模を簡単に拡大できるため、細いパイプを通して物質を運搬したり、人体の中に入れることも想定できるという。例えば、狭い血管を通して薬剤を運び、必要な場所に正確に放出することができる。磁気作動デバイスはロボット以外にも生物医学的な可能性を秘めており、人工筋肉や組織再生をサポートする材料に組み込まれる日が来るかもしれないと考えられている。
関連情報
Magnetic robots walk, crawl, and swim | MIT News | Massachusetts Institute of Technology