

タグ:脚ロボットの歩行パターン
-
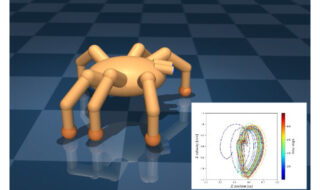
スパイキングニューラルネットワークの組み合わせでエネルギー効率に優れた脚ロボットの動きを生成 東北大学
東北大学大学院工学研究科 教授の林部充宏氏らの研究グループは2021年12月23日、スパイキングニューラルネットワークを用いた深層強化学習により、エネルギー効率の良い脚ロボットの歩行パターンを生成したと発表した。スパイキ…詳細を見る-
-



2024-11-18
世界初のオープンイヤー型ヘッドホン向けノイズキャンセリング技術を開発 NTT
2024-11-20
熱を発し自己修復もするサステナブルなコンクリートを開発――道路の除雪や除氷に期待




Copyright © fabcross for エンジニア All rights reserved.