- 2024-11-21
- REPORT, 機械系
- 100均ロボ, Scratch, クランリンク機構, リンク機構シミュレーター, ロボット, 多脚ロボット, 工作, 毛玉取りロボット, 転載, 電動消しゴム

こんにちは。片山均(かたやま ひとし)です。愛媛県八幡浜市にある三瀬医院で院長を務めながら、主に100円ショップのグッズを使って、おもしろロボットを作っています。
私、2022年からMaker Faire Tokyoで100均ロボを展示しています。今年も参加してきました。

私の作品は多脚歩行ロボが多めとなっていますが、基本的に直進しかしませんので、動作させている間はロボットから目が離せません。これはゆゆしき問題です。
そこで、テーブル上をクルクルカタカタ回り続けるクラン(Klann)リンク機構を使った多脚ロボのオブジェを作りました。
そして、Maker Faire Tokyo出展後の勢いに任せて、出来上がったオブジェを診療所の玄関に展示。来院した人たちの反応はいかに?
クルクル歩くクランボロにクランリンク機構を使用した経緯
こちらが、クルクル歩くクランロボとなります。
今回のクルクル回るロボットは、展示会でロボットを追いかけなくてすむようにと思いついたものです。しかし、実はこの作品の前にも似たようなロボットを作って、ちょっとSNSでバズってました。
なんか作った!!#毛玉取りロボット #100均ロボ pic.twitter.com/krBSO55r0r
— 片山 均@八幡浜の三瀬医院 (@katabomb2) September 7, 2024
これからは、こういった感じのロボットをいろいろな脚機構で作れればいいなと思っていましたが、最近動力源となる毛玉取り器やプチ電車を100円ショップであまり見かけなくなりました。ということは、新しい動力源が必要です。
そこでいろいろ物色していたところ見つけたのが、電動消しゴムです。

電動消しゴムは、スイッチを押している間しかモーターが回らないため、展示の際に節電になります。しかし、電動消しゴムをオブジェの中央に配置すると、スイッチがとても押しづらいんです。これを解決すべく、ロボットの周回コース外に電動消しゴムを配置。これにより、少し複雑な構造になってしまいました。
さらに、この配置ではロボットが1周するため、電動消しゴムから動力を伝えるための竹箸を必ずまたぐ必要が出てきました。
これまで使ってきたテオヤンセン機構やチェビシェフリンク機構では、またぐのは難しそう。そこで今回、初めてクランリンク機構を採用しました。

この脚機構は脚が高く上がるため、障害物を乗り越えやすくなります。機能の設計は、以前ネットで見つけたScratchのプロジェクト「リンク機構シミュレーター」を用いました。
やっと出来上がったオブジェを動かしてみると、また問題発生。クランリンクをもってしても竹串を一度もまたげずに足踏みしてしまうのです。
これでもなんとかなるのではと、展示用の台(昔、病院で使って床頭台)に載せて動かしてみると、竹箸に脚を挟んでしまいました。
そこで、竹箸の周りに短く切った竹箸でちょっとした階段を作ったところ、なんとか止まらずにまたげるようになりました。

クルクル回るクランロボの製作過程
では、製作過程です。材料は以下の通りです。
- 電動消しゴム 1個
- 竹箸 12本
- 竹串 5本
- 木製スティック 20本
- ストロー 1本
- ミニストロー 2本
- ロリポップスティック 1本
- 厚紙 適量
- タイルマット 適量
- 輪ゴム 3本
- 画鋲 7個
- 足の長い画鋲 9個
- 網押さえゴム(網戸の張り替えに使う網を押さえるためのゴム) 3cm
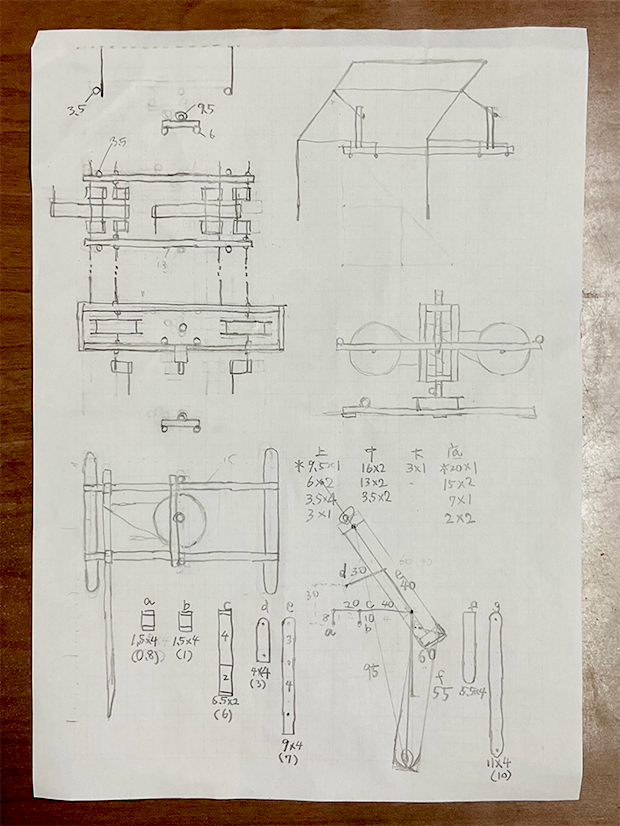
いつもよりもちょっと気合いの入った設計図です。
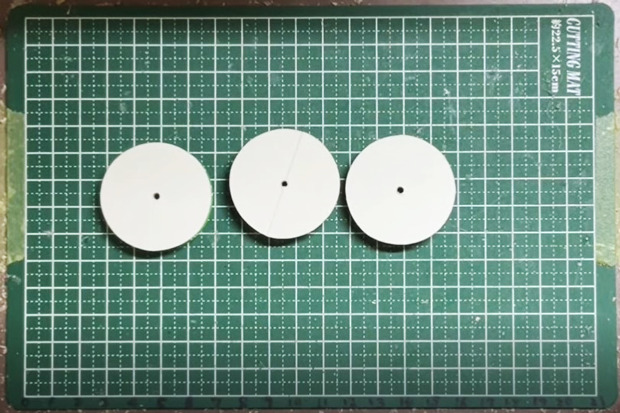
厚紙とタイルマットをコンパスカッターで円形に切り出します。それをグルーガンで貼り合わせてプーリーを作ります。
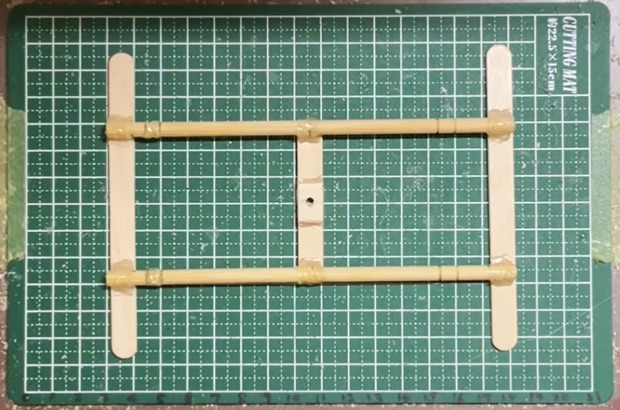
竹箸と木製スティックでオブジェの中央装置の土台を作ります。

電動消しゴムから消しゴムを外し、モーターのシャフトに網押さえゴムを差し込み、反対側に竹串を挿します。その竹箸とプーリーを、ストローを軸受けとして中央装置に取り付け、輪ゴムを掛けます。これで、電動消しゴムのスイッチを押すと中央装置の竹箸が回転する機構ができました。

竹箸、竹串、ミニストローとプーリーで、中央装置の竹箸の水平回転を受けて2本の竹串が鉛直回転するパーツを作ります。さらに木製スティック、画鋲、足の長い画鋲、ロリポップスティックで作ったパンタグラフ機構で、2本の竹串を同期させます。

木製スティック、ロリポップスティック、画鋲、足の長い画鋲でクランリンク機構と平行リンク機構を組み合わせた脚機構を組み立てます。
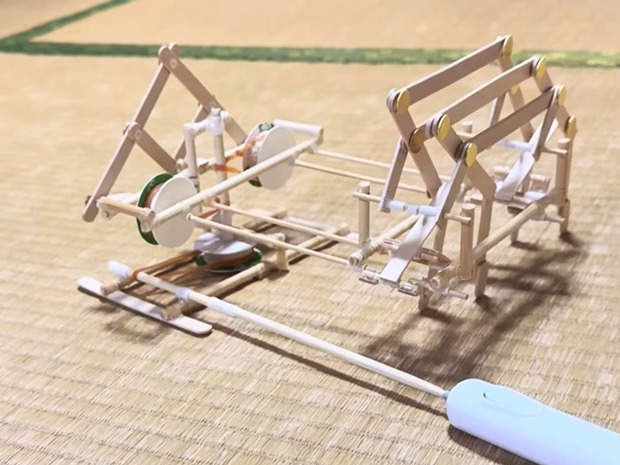
中央装置から出ている竹串に脚機構を取り付けると完成です。
診療所の入り口に展示。みんなの反応は?
ということで、完成したクランロボを診療所の入り口/玄関に展示してみました。みんな、喜んでくれるかなー?

初日。

9日目。

11日目。
職員と近所の薬局の先生は興味を示してスイッチを押してそれなりに喜んでくれましたが、患者さんでクランロボを動かす人はほとんどいませんでした……。なんでだ、なんでなんだ……。
私なりに問題点を洗い出してみました。
まず、動作音。木の台の上に置くと、動作時の音が大きいと感じました。マットのようなものを敷けばいいかもしれません。
次に外観。あまり見慣れないデザインなので、気味の悪いものに見えてしまったのかも。
さらに、扱い方がわからなかったのではないかと推察。スイッチの表示はしていましたが、自由に押していいのか迷ってしまった人もいるのかもしれません。
そして、以下が結構大きな問題かなと思ったんですが。
「診療所に変なロボットがあって、違和感がすごい」
おそらくこれが一番大きな要因なのかもしれません。
また、当診療所は成人しか診療していないため、興味を示すはずの子どもがやってこないことも原因ではないかと思います。親の受診に付いてきたお子さんは楽しんでいたという目撃情報も得ていますので、一筋の光明は差し込んでいるのではないかと。ええ。
そのほかにも、愛媛県南予地方は農家が多く、この時季は柑橘類や柿のお世話で忙しいこと、秋祭りの時期と重なったことも影響しているのではないかと思います。
今回のことにめげず、これからも100均ロボを作り続けていきます。
第30回の研究発表は以上です。次回もお楽しみに!
企画・制作:片山均
取材・文:三浦一紀
(fabcrossより転載)