© Zhenishbek Zhakypov / 2019 EPFL
「蟻集まって樹を揺るがす」とは、小さいものが集まって大きいものを動かすことのたとえだが、スイス連邦工科大学ローザンヌ校(EPFL)の研究チームは、こうしたアリの行動をヒントに小型ロボットを開発した。役割を分担し、意思疎通を図りながら、集団で行動できる。研究結果は、2019年7月10日付けの『Nature』に掲載されている。
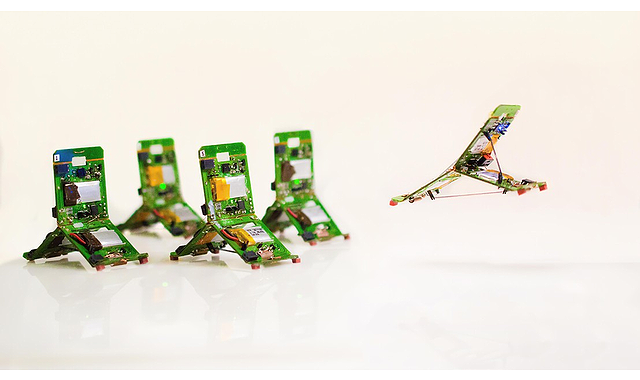
わずか10gの小型自律ロボットは、T字型で3本足の「トリボット」だ。薄いシート状の材料を折り紙のように折り、わずか数分で組み立てられるので、大量生産に向いている。物体の検出と通信用に赤外線センサーと近接センサー、バッテリーを搭載。さらに、必要に応じてセンサーを追加することもできる。
形状記憶合金のアクチュエーターと組み合わせ、平面を這って進むだけでなく、でこぼこの道を歩いたり、垂直跳び、水平跳び、宙返りなどアクロバティックな動きもできる。動きは、危険を察知するとジャンプして逃げるアギトアリを参考にした。
動きだけでなく、アリの集団行動も取り入れている。集団は「リーダー」「偵察隊」「実動部隊」に分かれ、偵察隊が進路上の障害物を検知して仲間に連絡、リーダーが指示を出し、実働部隊が障害物を動かす、といったように役割を分担するという。状況に応じて即座に役割を変えることもできる。
「このロボットは大量に製造し配置することができるので、多少の“負傷者”が出たとしてもミッションには影響しないだろう。集団的知性を使い、未知の環境への適応能力も高い。ミッションによっては、大型ロボットをしのぐ場合もあるだろう」と、研究チームは語る。