- 2018-7-22
- 技術ニュース, 機械系, 海外ニュース
- Nature Communications, Neel Doshi, エレクトロウェッティング(electrowetting), ジョン・A・ポールソン 電子工学・応用科学部(SEAS), ハーバード大学, ハーバード歩行型マイクロロボット(HAMR:Harvard Ambulatory Microrobot), 疎水性(濡れ性)
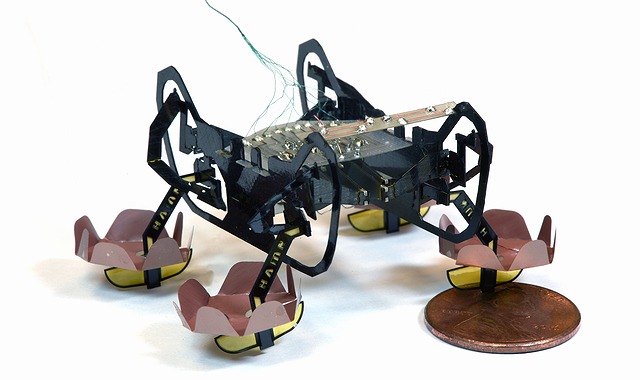
陸上・水上を歩き、潜水もできる超小型ロボットがハーバード大学で開発された。このゴキブリにも似た外観を持つロボットは、ハーバード大学ジョン・A・ポールソン 電子工学・応用科学部(SEAS)が開発した「ハーバード歩行型マイクロロボット(HAMR:Harvard Ambulatory Microrobot)」。4本足で陸上を歩き、足に付けた疎水性のパッドが受ける表面張力を利用して、水上でも歩行できる。
HAMRには、必要になれば足のパッドに電圧をかけてエレクトロウェッティング(electrowetting)を発生させ、疎水性(濡れ性)を変化させることで表面張力を破って潜水し、水中を歩行する能力がある。エレクトロウェッティングは、インクジェットプリンターやマイクロポンプにも応用されている現象だ。
これらの能力により、HAMRは水上を歩いて障害物を回避しながら目的の場所へ到着後に潜水、水中を歩き、緩い斜面を登って水から出るという一連の動作が可能になる。水中の調査やインフラの点検などへの応用が考えられている。
HAMRの重さは1.65gで、大きめのペーパークリップほど。1.44gまでのものを沈むことなく運ぶことができる。『Nature Communications』に掲載さた研究論文の共同著者のNeel Doshi氏は、「HAMRの重量がポイントだ。重すぎれば表面張力で浮くことはできないし、軽すぎれば表面張力を破って潜水することができない。」と述べている。
研究者達は、HAMRの移動能力の向上と、斜面を使わずに陸へ戻る方法について研究を続けている。今後はゴキブリではなく、ヤモリの足の吸着力などにも着目しているようだ。
関連リンク
Next-generation robotic cockroach can explore underwater environments