- 2019-7-15
- 化学・素材系, 技術ニュース, 海外ニュース
- Daniel J. Preston, Science Robotics, Whitesides研究室, ソフトリングオシレーター, ソフトロボット, ハーバード大学, 学術

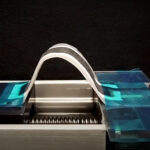
Image courtesy of the Bertoldi Lab/Harvard SEAS
ハーバード大学の研究チームは、柔らかい部品と空気圧だけを使った「ソフトリングオシレータ」を開発し、回転、うねり、物の仕分けなど、複雑な動きができるソフトロボットを作製した。物流から医療まで幅広い分野に、低価格で安全なソフトロボットの提供が期待できる。研究結果は、2019年6月26日付『Science Robotics』に掲載されている。
同大のWhitesides研究室では、近年、ソフトバルブやゴム製コンピューターなど、電子機器や硬い素材をまったく使わないで動くソフトロボットの開発を進めている。シリコンゴムの論理ゲートを組み込んだ水中ロボットなどがそうだ。動力には電気やワイヤを使わず、加圧空気でゴム製ボディを膨張・収縮させて、ロボットに動きを与えている。
論文の筆頭著者であるポスドクのDaniel J. Preston氏は、このようなソフトロボット用の新しいツールとして、柔らかい部品だけを使ったソフトリングオシレータを開発した。電子回路のリングオシレータ同様、インバータ(NOTゲート)を奇数個リング状につなぎ、各インバータの出力は次のインバータの入力に接続されている。インバータは空気圧で動作し、入力が高圧だと出力は低圧になり、逆も同様だ。初段のインバータの出力が反転することで次段へのトリガーとなり、最終段まで伝播すると、再び初段に入力される。これにより、わずかな圧力変化を使い、高速で連続的に作動するソフトロボットが実現できる。
「リングオシレータは回転運動のようなものに非常に適している」とPreston氏は語る。3つのニューマチックアクチュエーター(インバータ)から成るソフトリングオシレータを搭載したロボットをいくつか試作した。いずれも、一定の空気圧(大気圧)を使い、アクチュエーターを駆動できることを実証している。
例えば、円形トラック上のボールを何周でも転がすことができるロボット。または、側面につけた風船をそれぞれ正確に同期して膨張・収縮させながら、転がりながら進むことができる六角柱状のロボット。さらに、粒子を大きさで選別するロボットや、3色の液体をあらかじめ決められたシーケンスと時間で分類するロボットも作製した。
ソフトリングオシレータはまた、医療用ソフトデバイスにも応用できる。リンパ浮腫や慢性の静脈疾患、血栓の予防と軽減に効果があるとされる「フットポンプ」を作製。作製したデバイスは、単に柔軟で安価なホームケア製品として市場のニーズに応えるだけではない。素材の生態適合性、使い捨て可能、柔軟、滅菌の容易さといった特徴は、体内へのドラッグデリバリーシステムや、心臓の動きの補助など最新の医療機器に応用することもできる。
研究チームは既に、駆動速度や加圧空気の供給方法の改善について、いくつか解決策を見出している。さらに、今回の発表によって、このコンセプトをいかせる新しい用途が他の研究室でも見つかることを望んでいる。