- 2019-10-24
- ニュース, 技術ニュース, 電気・電子系
- エクセター大学, オックスフォード大学, マイクロ流体デバイス, マックス・プランク研究所, 大阪大学, 治療ロボット, 研究, 磁性ロボット, 磁性粒子, 磁気回転子, 薬物輸送システム
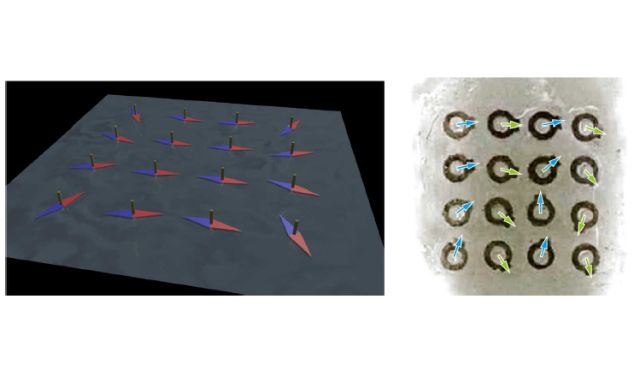
(左)格子状に配置された磁気回転子の概念図(右)実験の様子
大阪大学は2019年10月17日、格子状に配置された磁気回転子の集団的な回転パターンを制御する手法を発見したと発表した。なお、この研究は、マックス・プランク研究所、オックスフォード大学、エクセター大学との共同で行われている。
磁性粒子は、外部磁場を加えると磁場方向に向こうとして回転する性質を持つ。近年、磁性粒子のこの性質を利用した様々な磁性ロボットが開発されており、体内を移動する治療ロボットや薬物輸送システムなどへの応用が期待されている。一方、外部磁場によるシグナル(指示)は、磁性ロボットが複数存在しても等しく伝わってしまう。そのため、2体以上のロボットに異なる指示を与えることは困難だと考えられてきた。
そこで、研究グループは今回、外部磁場を加えたときの磁性粒子の集団回転運動のパターンを分析した。具体的には、磁気回転子と呼ばれる空間に固定された磁性粒子を考え、4×4のグリッドの交点に回転子を配置。そして、強さや周波数を変化させた外部磁場を加え、回転子の挙動を観察した。その結果、同一のシグナルでも、磁場の条件により異なる運動を示す回転子が現れることを発見。さらに、磁気回転子の集団運動を制御できることがわかった。なお、回転子の互いに異なる運動は、磁気回転子同士に働く磁気相互作用によって生じていると説明している。

磁気回転子の集団回転パターンと誘起される流れ場
研究グループは、この成果から、磁性ロボットだけでなく、マイクロ流体デバイス上で働くマイクロスケールのポンプやミキサーへの応用も期待できるとしている。